

4.2.1. Экспертные информационные системы
Такие системы могут создаваться по схемам построения адаптивных систем. Наиболее приемлемой является схема с эталонной моделью. Функционирование динамической структурной экспертной системы происходит в несколько этапов. На первом осуществляется проектирование системы управления, включающее выбор структуры модели объекта, идентификацию его параметров, определение закона управления, синтез и предварительную настройку параметров этого закона. На втором этапе производится обучение системы, отсеиваются отклонения от заданных режимов, формируются данные о взаимосвязи параметров среды с параметрами системы и её модели. На третьем этапе реализуется управление на основе сопоставления имеющейся теоретической информации, полученной на предыдущих этапах, с реальными данными от датчиков о состоянии объекта управления и внешней среды.
Важнейшей составляющей экспертной системы является база знаний об идентификации объекта и синтезе алгоритмов управления. При идентификации объекта используются частотные, статистические и другие подходы. Для создания базы данных о синтезе алгоритмов управления применяют различные критерии: интегральный квадратичный, максимальной степени устойчивости, с использованием показателей качества системы в переходном режиме и т.п. В случае нелинейных алгоритмов рассматриваются методы Ляпунова и Лагранжа.
4.2.2. Нейросетевые сау
Нейросетевые технологии в интеллектуальных системах позволяют решать ряд задач в управлении, когда информация об объекте неполная и неточная [9]. В таких случаях мощные традиционные информационные средства, такие как система моделирования Matlab + Simulik, не дают нужного результата. Так как искусственные нейронные сети строятся на принципах биологических сетей, то они обладают важными свойствами последних, склонны к обучению и обобщению. За счёт распараллеливания информации они обладают высоким быстродействием. Схема искусственного нейрона приведена на рис. 4.2.
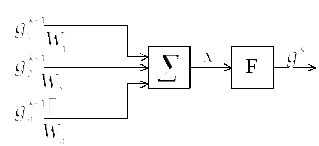
Рис. 4.2
На нейрон подаются
сигналы
![]() ,
после умножения на свой вес
,
после умножения на свой вес![]() они суммируются. Сигнал
они суммируются. Сигнал![]() модифицируется специальной функцией
модифицируется специальной функцией![]() так, что выходной сигнал нейрона [9]
так, что выходной сигнал нейрона [9]
![]() . (4.1)
. (4.1)
В интеллектуальных системах наибольшее распространение получила многослойная сеть прямого распространения (рис. 4.3). На этой схеме прямоугольниками показаны отдельные нейроны.
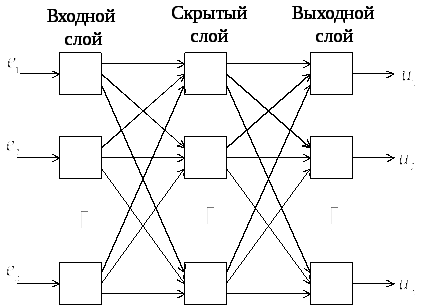
Рис. 4.3
В такой сети скрытых слоёв может быть несколько. Число нейронов во входном и выходном слоях определяется количеством входных и выходных координат. Число нейронов в скрытых слоях подбирается опытным путём.
При обучении сети решается ряд задач по коррекции весовых коэффициентов отдельных нейронов. Некоторые подходы изложены в [9].
Наиболее предпочтительная область применения нейронных сетей – распознавание образов. Возможно их использование в системах управления производственными объектами [9].
4.2.3. Сау с ассоциативной памятью
В системах управления может быть организована и использована ассоциативная память. Ассоциативная память – это средство хранения информации на основе ассоциации, т.е. её извлечение по сочетанию определённых признаков.
Различают [8] пирамидальную (иерархическую), матричную и самоорганизующуюся память.
Пирамидальная память осуществляет классификацию входного информационного вектора по одному признаку, затем по-другому и так до тех пор, пока все признаки не совпадут с какой-либо классификационной группой.
Матричная память – это один уровень пирамидальной ассоциативной памяти. Она реализуется на логических элементах и нейросетях.
Самоорганизующаяся память хранит информацию в виде аттракторов, на один из которых выходит система.
Интеллектуальные системы с ассоциативной памятью могут работать в условиях предсказуемой и непредсказуемой неопределённости. В первом случае обучение системы происходит автоматически, поскольку известна заранее информация о поле, в котором меняются координаты объекта управления. Во втором случае в процессе первичного обучения участвует оператор. После того, как произведено первичное обучение, ассоциативная память заменяет человека и далее осуществляется автоматическая подстройка структуры и параметров объекта управления. При использовании ассоциативной памяти уменьшается её объём и повышается быстродействие системы в целом.