

22.Решение систем линейных уравнений с помощью определителя(теорема Крамера)
Рассмотри систему линейных уравнений с nнеизвестным x1 и т.д.
 (1)
(1)
Определителем системы (1) называется определитель матрицы А составленной из коэффициента этой системы т.е. Δ=detA
Обозначим через Δk ,определитель полученный из определителя Δ с помощью замены столбца из коэффициентов при неизвестной xkстолбцов и свободных членов системы (1)
Δ= Δk=
Δk= ,k
,k (2)
(2)
Теорема Крамера
Если определитель системы (1) отличен от нуля, то система имеет единственное решение
x1= ,x2=
,x2=
 ,…,xn=
,…,xn= (3), где
(3), где и
и (k=1,n)
определены формулами (2)
(k=1,n)
определены формулами (2)
Формулы (3) называются формулами Крамера.
Пример 1
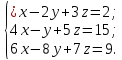
Решение:
Δ= =-49≠0,
значит можем решить его по формулам
Крамера.
=-49≠0,
значит можем решить его по формулам
Крамера.
Δ1= =-147,Δ2=
=-147,Δ2= =-98,Δ3=
=-98,Δ3= =-49,
значитx=
=-49,
значитx= =
= =3,y=
=3,y= =
= =2,z=
=2,z= =
= =1.
=1.
Ответ : (3,2,1)
23. Исследование систем линейных уравнений (теорема Кронекера-Капелли, базисный минор, базисные и свободные неизвестные)
Рассмотрим
систему (1) из §1
с основной матрицей системы (2) §1
и расширенной матрицей А (3) §1.
Теорема 1 Кронекера-Капелли:
Для
совместности системы (1) §1
необходимо и достаточно чтобы ранг ее
матрицы был равен рангу расширенной
матрицы, т.е. rangA=rangA
Теорема 2
Если ранг матрицы совместно системы равен числу неизвестных, то система имеет единственное решение.
Теорема 3
Если ранг матрицы совместно системы меньше числа неизвестных, то множество ее решений является бесконечным.
Базисным минором матрицы называется отличный от нуля ее минор порядок которого равен рангу этой матрицы.
Базисными неизвестными совместной системы ранг которой равен r, назовем r неизвестных коэффициенты при которых образуют базисный минор. Остальные неизвестные назвают свободными.
Из
теорем следует, что решение систем
линейных уравнений нужно проводить
следующим образом.


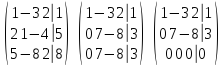
Находят ранг r матрицы A и ранг r матрицы (расширенной) A. Если r≠r , то система не совместна.
2.
r=r,
то выделяют базисный минор и базисные
неизвестные. Исходную систему уравнения
заменяют эквивалентной ей системе
состоящей из тех r
уравнений в котороые вошли элементы
базисного минора. 
Пример 2
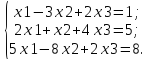
Решение:
Так
как
 значитr=r=α
и система совместна.
значитr=r=α
и система совместна.
В
матрице А системы минор
 ≠0,
минор является базисным, ему соответствует
система уравнений
≠0,
минор является базисным, ему соответствует
система уравнений

Которой переменные x1 x2 являются базисными, а переменная x3 свободной. Решим последнюю систему по формулам Крамера:
Δ= =1-2*(-3)=7≠0
=1-2*(-3)=7≠0
Δ1= =1-2x3-(-15-12x3)=16+10x3
=1-2x3-(-15-12x3)=16+10x3
Δ2= =3+8x3
=3+8x3
Значит
x1= =
= ,x2=
,x2= =
=
Ответ
: ( ;
; ;t),
t
;t),
t
24.Матричный метод решения систем линейных уравнений
Матрицы дают возможность кратко записать систему линейных уравнений. Пусть дана система из 3-х уравнений с тремя неизвестными:

Рассмотрим
матрицу системы  и
матрицы столбцы неизвестных и свободных
членов
и
матрицы столбцы неизвестных и свободных
членов
Найдем произведение

т.е. в результате произведения мы получаем левые части уравнений данной системы. Тогда пользуясь определением равенства матриц данную систему можно записать в виде
 или
короче A∙X=B.
или
короче A∙X=B.
Здесь матрицы A и B известны, а матрица X неизвестна. Её и нужно найти, т.к. её элементы являются решением данной системы. Это уравнение называют матричным уравнением.
Пусть
определитель матрицы отличен от нуля
|A|
≠ 0. Тогда матричное уравнение решается
следующим образом. Умножим обе части
уравнения слева на матрицу A-1,
обратную матрице A: ![]() .
ПосколькуA-1A
= E и E∙X
= X,
то получаем решение матричного уравнения
в виде X
= A-1B.
.
ПосколькуA-1A
= E и E∙X
= X,
то получаем решение матричного уравнения
в виде X
= A-1B.
Заметим, что поскольку обратную матрицу можно найти только для квадратных матриц, то матричным методом можно решать только те системы, в которых число уравнений совпадает с числом неизвестных. Однако, матричная запись системы возможна и в случае, когда число уравнений не равно числу неизвестных, тогда матрица A не будет квадратной и поэтому нельзя найти решение системы в виде X = A-1B.
Примеры. Решить системы уравнений.

Найдем матрицу обратную матрице A.
![]() ,
, 
Таким образом, x = 3, y = – 1.
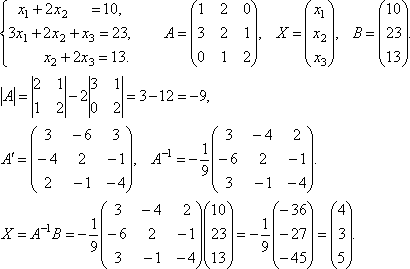
Итак, х1=4,х2=3,х3=5.
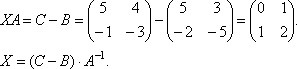
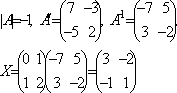
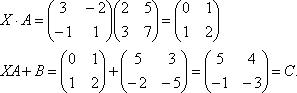
Решите матричное уравнение: XA+B=C, где
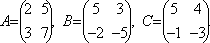
Выразим искомую матрицу X из заданного уравнения.
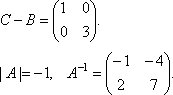
Найдем матрицу А-1.
Проверка:
Решите матричное уравнение AX+B=C, где

Из
уравнения получаем ![]() .
.
Следовательно,![]()