

МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РФ ГОСУДАРСТВЕННОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ «ВЯТСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ»
Факультет автоматики и вычислительной техники Кафедра электропривода и автоматизации промышленных установок
Присмотров Н. И., Охапкин С. И.
ГИДРАВЛИЧЕСКИЕ
И ПНЕВМАТИЧЕСКИЕ ПРИВОДЫ
Учебное пособие
Для специальности 140604
Киров 2010
|
|
Оглавление |
|
ВВЕДЕНИЕ...................................................................................................................... |
4 |
||
1 Гидромеханические свойства двигателей................................................................ |
10 |
||
1.1 |
Рабочие жидкости и их свойства........................................................................ |
10 |
|
1.2 |
Виды течений жидкости. Гидравлические сопротивления и проводимости 11 |
||
1.3 |
Гидрогенераторы и гидродвигатели.................................................................. |
15 |
|
1.3.1 Шестеренчатые гидромашины..................................................................... |
17 |
||
1.3.2 |
Винтовые гидромашины.............................................................................. |
18 |
|
1.3.3 |
Пластинчатые гидромашины...................................................................... |
19 |
|
1.3.4 |
Поршневые гидромашины........................................................................... |
21 |
|
1.3.5 |
Гидромашины возвратно-поступательного движения............................. |
23 |
|
1.4. Математическое описание процессов гидромеханического преобразования
энергии........................................................................................................................ |
24 |
||
1.5 |
Гидромеханические и механические характеристики двигателей................. |
27 |
|
1.6 |
Режимы гидромеханического преобразования энергии. ................................ |
30 |
|
1.7 |
Структурные схемы гидродвигателей.............................................................. |
36 |
|
1.8 |
Способы регулирования скорости гидропривода ............................................ |
41 |
|
1.8.1 |
Дроссельное регулирование скорости гидропривода............................... |
41 |
|
1.8.1.1 Регулирование с параллельным включением дросселя ......................... |
42 |
||
1.8.1.2 Регулирование с последовательным включением дросселя.................. |
44 |
||
1.8.2. Объемное регулирование скорости гидропривода................................... |
52 |
||
2 Управляющие элементы гидропривода.................................................................. |
56 |
||
2.1 |
Дроссели ............................................................................................................... |
56 |
|
2.2 |
Дросселирующие гидрораспределители........................................................... |
58 |
|
2.2.1 Дросселирующие золотниковые гидрораспределители............................ |
58 |
||
2.2.2 Дросселирующие гидрораспределители типа сопло-заслонка................. |
65 |
||
2.3 |
Регуляторы давления........................................................................................... |
69 |
|
2.4 |
Электрогидравлический усилитель мощности................................................ |
69 |
|
2.4.1 |
Электромеханические преобразователи .................................................... |
70 |
|
2.4.2 |
Однокаскадный золотниковый ЭГУ........................................................... |
74 |
|
2.4.3 Однокаскадный ЭГУ с двухщелевым гидрораспределителем................. |
77 |
||
сопло-заслонка........................................................................................................ |
77 |
||
2.4.4 Многокаскадные электрогидравлические усилители мощности............. |
78 |
||
2.4.5 Гидравлические усилители, управляемые электрическими..................... |
85 |
||
двигателями............................................................................................................. |
85 |
||
3 Системы регулируемого гидропривода.................................................................. |
86 |
||
3.1 |
Электрогидравлический привод с дроссельным регулированием скорости 86 |
||
3.2 |
Электрогидравлический привод с объемным регулированием скорости...... |
88 |
|
3.3 |
Электрогидравлический привод с объемно-дроссельным регулированием |
|
|
скорости...................................................................................................................... |
92 |
||
4 Применение гидропривода....................................................................................... |
94 |
||
4.1 |
Гидроприводы строительных машин ............................................................... |
94 |
|
4.1.1 |
Гидропривод стрелы автомобильного крана............................................. |
94 |
|
4.1.2 |
Гидропривод трубоукладчика..................................................................... |
95 |
|
|
|
3 |
|
4.1.3 |
Гидропривод малогабаритных машин....................................................... |
96 |
|
4.2 |
Гидроприводы станков и промышленных роботов......................................... |
99 |
|
4.2.1 |
Гидропривод многоцелевого станка типа «обрабатывающий центр».... |
99 |
|
4.2.2 |
Гидропривод плоскошлифовального станка........................................... |
102 |
|
4.2.3 |
Гидропривод вертикально-протяжного станка....................................... |
103 |
|
4.2.4 Гидросистема промышленного робота «Универсал-15.02» .................. |
106 |
||
5 Электропневматические приводы......................................................................... |
110 |
||
5.1 |
Основы газодинамики...................................................................................... |
110 |
|
5.2 |
Пневмомеханические свойства пневмоцилиндров....................................... |
111 |
|
5.3 |
Дросселирующий пневмораспределитель...................................................... |
116 |
|
5.4 |
Электропневматический регулируемый привод........................................... |
117 |
|
5.5 |
Пневматическая система робота МРЛУ – 200 – 901..................................... |
118 |
|
Приложение А.......................................................................................................... |
121 |
||
(справочное) ............................................................................................................. |
121 |
||
Приложение В.......................................................................................................... |
122 |
||
(справочное) ............................................................................................................. |
122 |
||
СПИСОК ЛИТЕРАТУРЫ....................................................................................... |
126 |
||
4
ВВЕДЕНИЕ
Исполнительные устройства являются важнейшими элементами станков с числовым программным управлением, манипуляторов, автооператоров и т.п. и во многом определяют функциональные, а также точностные показатели их работы. Эти устройства снабжены автоматизированными приводами различного типа. Наибольшее распространение получили три типа привода – гидравлический (ГП), пневматический (ПП), электрический (ЭП). Они различаются принципом действия и функциональными возможностями.
Тип привода выбирается с учетом назначения исполнительного устройства, требований к его техническим характеристикам, а также с учетом стоимости, надежности, удобства обслуживания, эксплуатационных расходов. Например, достаточно широкое применение пневмоприводов обусловлено их низкой стоимостью, простотой конструкции, надежностью. Но вместе с тем мягкие механические характеристики пневмодвигателей не позволяют получить низкие стабильные скорости, что затрудняет создание на их основе замкнутых по положению систем привода.
К достоинствам ГП можно отнести большую удельную мощность по сравнению с ПП и ЭП, высокое быстродействие, жесткие механические характеристики. Все это позволяет создать ГП с любым типом системы управления и с любой грузоподъемностью. К недостаткам ГП можно отнести зависимость его характеристик от температуры, высокую стоимость, ограниченный ресурс, относительную сложность обслуживания.
Электропривод, в силу своих несомненных преимуществ, таких как легкость регулирования координат, относительная простота монтажа и эксплуатации, отсутствие трубопроводов и аккумуляторов энергии, низкий уровень шума при работе, получает все более широкое распространение.
Системы электрического, гидравлического и пневматического привода, при однотипной механической части, несмотря на различие физических процессов протекания электромеханического, гидромеханического, и
5
пневмомеханического преобразования энергии описываются аналогичными дифференциальными уравнениями.
Данное обстоятельство позволяет использовать при анализе и синтезе рассматриваемых приводов аналогии математических моделей двигателей, элементов систем управления, а также видов их эксплуатационно-технических характеристик, режимов работы. Поэтому широко применяемые в теории электропривода при исследовании динамических режимов частотные методы теории автоматического управления, на основе передаточных функций, структурных схем и частотных характеристик, целесообразно использовать и для систем ГП и ПП с целью создания единой методики их исследования.
В настоящее время, несмотря на наличие обширной литературы, отсутствует систематизированное изложение вопросов ГП и ПП с позиций, близких по подходу, методике и терминологии к описанию систем электрического привода. Поэтому выявлению аналогий трёх рассматриваемых типов привода в изложении материала пособия уделено самое пристальное внимание, что по мнению авторов, позволяет значительно облегчить изучение систем ГП и ПП студентам специальности «Электропривод и автоматика».
Принцип действия ГП и ПП основан на использовании энергии давления жидкости или газа. Исполнительными устройствами таких приводов являются объемные гидро- и пневмодвигатели, в которых преобразование энергии происходит в процессе попеременного заполнения рабочей камеры. Поэтому элементы объемных гидро- и пневмоприводов имеют аналогичный принцип действия и сходные конструкции. Разница между ними заключается в том, что в гидроприводе передача энергии от источника к двигателю осуществляется за счет рабочей жидкости, а в пневмоприводе – за счет воздуха.
Гидропривод (пневмопривод) образует совместно с приводимым в движение механизмом единую гидромеханическую (пневмомеханическую) систему. Поэтому как объект изучения ГП (ПП) состоит из гидромеханического преобразователя (ГМП) или пневмомеханического преобразователя (ПМП)
6
энергии и системы управления, а механическая часть включает в себя все связанные движущиеся массы привода и механизма.
Сеть
РС |
|
|
|
|
|
|
|
|
|
Гидродвигатель |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
(пневмодвигатель) |
|
|
|
|
||||
Система управления |
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
||||||||||
UC |
|
|
|
|
|
|
|
|
Fмех |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
IC |
|
|
|
|
|
|
|
|
|
|
|
|
РРО |
|||
ωПД |
|
Q |
|
|
QД |
|
|
F,M |
|
F,M |
|
Ммех |
||||
|
|
|
|
|
|
|
||||||||||
|
|
|
|
Н |
ГУ |
|
ГПМ |
Р |
|
|
FРО |
|||||
|
|
|
|
|
|
|
ПМ |
|
|
|||||||
|
|
|
ПД |
|
|
|
|
|
ИМ |
МРО |
||||||
|
|
|
(К) |
|
(ПУ) |
p |
|
(ПМП) |
|
(П) |
|
|||||
|
|
|
МПД |
p |
|
υ, ω |
υ, ω |
|
υмех |
υ РО |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
ωмех |
ωРО |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||

 Механическая часть
Механическая часть
 ИСУ
ИСУ  От датчиков обратной связи
От датчиков обратной связи
От задающих устройств
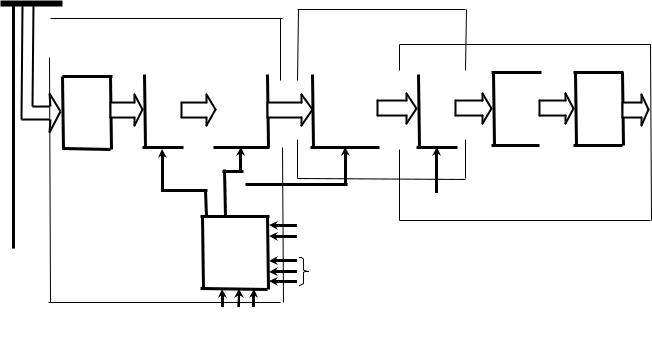
Рисунок В1 - Схема гидравлического (пневматического) привода.
Соответствующая единому представлению схема ГП (ПП) приведена на рисунке В1. На рисунке В1 поток мощности от сети к исполнительному органу (ИО) представлен стрелками. Потребляемая из сети электрическая мощность РC при определённых значениях напряжения UC , тока IC и частоты fC поступает в энергетическую часть системы управления (СУ).
В состав энергетической части СУ входят приводной двигатель (ПД), гидронасос (Н) или компрессор (К), гидроусилитель (ГУ) или пневмоусилитель
(ПУ). В Н (К) механическая мощность с вала ПД PÏ Ä Ì Ï Ä Ï Ä преобразуется в мощность потока жидкости (газа) P = Q . p. В регулируемом ГП (ПП) в ГУ (ПУ) обеспечивается преобразование расхода (подачи) жидкости (газа) Q или давления р до уровня необходимого для управления работой ГП (ПП). Мощность потока
7
жидкости (газа), подаваемая на гидродвигатель (пневмодвигатель), преобразуется в механическую.
Информационная часть системы управления (ИСУ) вырабатывает воздействия, управляющие энергетической частью СУ, рабочим объектом ГМП (ПМП) и передаточным механизмом ПМ, на основе информации о заданных режимах работы и текущем состоянии ГП (ПП) и протекании технологического процесса.
Гидромеханическое (пневмомеханическое) преобразование энергии осуществляется ГМП (ПМП), которые рассматриваются как идеализированные двигатели, ротор (поршень) которых не обладает механической инерцией, не имеет механических потерь и жёстко связан с реальным ротором (поршнем), входящим в состав механической части ГП (ПП). К такому ротору (поршню) приложен развиваемый момент двигателя (М) или усилие (F) при скорости ω(υ), и вырабатывается соответствующая мощность. Эта мощность передаётся реальному ротору (Р) или поршню (П) и частично расходуется на увеличение запасённой в их массе кинетической энергии и на преодоление моментов (сил) механических потерь двигателя. Оставшаяся часть мощности с вала (поршня) двигателя поступает через передаточный механизм (ПМ) в виде механической мощности в исполнительный механизм (ИМ) и далее к его рабочему органу. На пути от вала двигателя до рабочего органа часть мощности затрачивается на увеличение запаса кинетической энергии движущихся масс ПМ и ИМ, а также на преодоление механических потерь в передачах и механизме.
Механическая мощность РРО представляет полезную мощность на рабочем органе при моменте МРО, усилии FРО и скорости ωРО (υРО).
Поток жидкости (газа) характеризуется двумя основными параметрами: расходом Q и давлением p.
Давление определяет внутреннее напряжение сжатия жидкости (газа) и действует во все стороны одинаково. За единицу его измерения в системе СИ принят паскаль, равный давлению, вызываемому силой в 1 Н, равномерно распределенной по площади 1 м2 (1 Па = 1 Н/м2 ). Часто давление дается в

8
мегапаскалях, 1 МПа = 106 Па = 10,2 кгс/см2 = 10,2 ат. Техническая атмосфера
1ат=1кгс/см2 = 9,81 Н/см2.
Расходом жидкости (газа) или потоком Q называется объем жидкости (газа) V, прошедший через данное сечение S в единицу времени t:
Q V . |
(В.1) |
t |
|
Единица измерения расхода в системе СИ – м3/с.
Мощность потока жидкости (газа) Р, равная работе за единицу времени, в системе СИ измеряется в ваттах:
P Q p , |
(В.2) |
где Q – расход, м3/с; р – давление, Па.
Система управления СУ состоит из информационной части ИСУ и силовой части – гидроусилителя ГУ (пневмоусилителя ПУ), который усиливает мощность электрических сигналов от ИСУ и преобразует ее в мощность потока рабочей жидкости. В пневмоприводах, работающих по упорам, ПУ обычно выполняет функции пневмораспределителя, обеспечивающего реверсирование потока газа.
ИСУ получает командные сигналы от задающих устройств ЗУ и информацию о состоянии привода от датчиков обратной связи ДОС. На основании этой информации в
соответствии с заложенным |
алгоритмом |
вырабатываются командные сигналы на Н, ГУ, |
|
передаточный механизм ПМ, управляющие |
|
рабочим органом РО. |
Рисунок В.2. |
Гидродвигатель ГД (пневмодвигатель ПД) преобразует мощность потока жидкости (газа) в механическую мощность.
9
Принцип действия объемного гидропривода легко проследить по простейшей его схеме (рисунок В.2), состоящей из насоса 1 и последовательно
соединенного с ним гидроцилиндра 2. |
|
||
Движущее усилие при давлении насоса р равно: |
|
||
|
АП p F FТР, |
(В.3) |
|
где АП – рабочая площадь поршня; |
|
||
F – сила нагрузки на штоке гидродвигателя; |
|
||
FТР – сила трения в гидродвигателе. |
|
||
Отсюда требуемое давление определяется нагрузкой и трением |
|
||
p |
F FТР |
(В.4) |
|
А |
|
||
|
П |
|
|
и не зависит в рабочем процессе от параметров насоса. То есть, аналогично электрическим двигателям, обладающим свойством саморегулирования (потребляемый из сети ток определяется нагрузкой), свойство саморегулирования присуще и гидродвигателям, у которых с ростом нагрузки растет давление р.
В рассматриваемом случае производительность насоса QН равна расходу жидкости в гидродвигателе:
QН QГД АП , |
(В.5) |
||
где υ – скорость течения жидкости. |
|
||
Из уравнения (В.5) следует: |
|
||
|
QН |
. |
(В.6) |
|
|||
|
А |
|
|
|
П |
|
|
Соотношение (В.6) показывает, что подобно двигателю постоянного тока независимого возбуждения (ДПТНВ), скорость которого определяется величиной приложенного к якорю напряжения, в гидродвигателе скорость пропорциональна расходу жидкости.
Отсюда можно провести аналогию между давлением и силой тока, между расходом и напряжением.