


36
Продолжение таблицы 1.3 |
|
|
|
|
|
|
|
|
|
|||
Е=с·ω |
|
В |
QД = w· ω |
|
м3·с-1 |
QЦ =АП· υ |
|
м3·с-1 |
QПЦ =АП· υ |
|
м3·с-1 |
|
IЯRЯ∑ |
|
В |
QУТ=kУТ· р |
|
м3·с-1 |
QУЦ=kУЦ· р |
|
м3·с-1 |
QУПЦ=kУПЦ· |
р |
м3·с-1 |
|
Электромехани- |
Гидромеханическая характеристика |
Пневмомеханическая |
||||||||||
ческая |
|
|||||||||||
|
|
|
|
|
|
|
|
характеристика |
||||
характеристика |
ω=f( |
р) |
|
υ =f( р) |
|
|||||||
|
|
υ =f( |
р) |
|||||||||
ω=f(IЯ) |
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
Механическая |
характеристика |
|
|
|
|||||
ω=f(М) |
|
ω=f(М) |
|
υ =f(F) |
|
υ =f(F) |
||||||
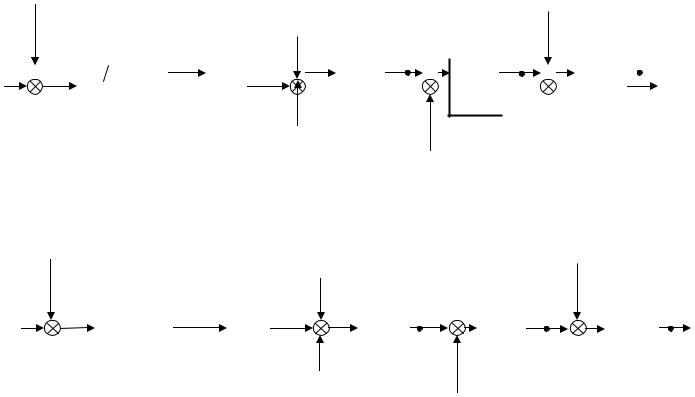
1.7 Структурные схемы гидродвигателей
Для получения структурной схемы необходимо записать уравнения, отражающие процессы гидромеханического преобразования энергии, в операторной форме записи.
Рисунок 1.12 Структурные схемы гидромеханического преобразования энергии в гидродвигателях.

37
У гидродвигателей вращательного движения, позволяющих регулировать величину рабочего объёма, уравнения гидромеханического преобразования энергии в операторной форме запишутся в следующем виде:
1. QC = w·ω + kут(Тгр+1)· р; |
2. V0 |
= x·k; |
(1.48) |
|
3. w = V0/2π; |
4. M = w р |
|||
|
||||
где х – входная величина, задающая рабочий объём гидродвигателя;
k – коэффициент передачи органа управления, регулирующего рабочий объём гидродвигателя.
Структурная схема гидродвигателя для данного случая приведена на рисунке 1.12,а.
Уравнения гидромеханического преобразования энергии для
гидродвигателя при постоянстве рабочего объёма камеры V0 = сonst примут вид:
|
QC = w·ω + kут(Тг р+1)· р ; М = w· р |
(1.49) |
||
Структурная схема, соответствующая V0 = сonst, дана на рисунке 1.12,б. |
||||
Для |
гидроцилиндров |
система |
уравнений |
гидромеханического |
преобразования энергии |
|
|
|
|
|
Q = АП·υ + kуц(Тц·р + 1); F = АП р |
(1.50) |
||
Соответствующая структурная схема представлена на рисунке 1.12, в. Процессы, протекающие в гидравлической (пневматической) и
механической частях гидропривода (пневмопривода), находятся в тесной взаимосвязи за счёт зависимости расхода гидро-(пневмо)двигателей QД, QЦ(QПЦ) от механической координаты - скорости вращения вала двигателя ω или скорости перемещения поршня υ гидро-(пневмо)цилиндра. Данные зависимости QД=w·ω=f(ω), QЦ=АП·υ=f(υ) и QПЦ=АП·υ=f(υ) и отражают гидромеханическую связь в гидроприводе и пневматическую связь в пневмоприводе, аналогично
38
электромеханической связи в электроприводе представляющей собой зависимость ЭДС двигателя от скорости E = kФω = f(ω).
Система уравнений, описывающих движение гидропривода вращательного движения при V0=сonst и представлении механической части в виде одномассовой системы, примет вид:
1.Q w k |
ут |
Т |
г |
p 1 р |
|
|
c |
|
|
|
|||
2.М w р |
|
|
|
|
|
(1.51) |
|
|
|
|
|
||
3.М МС J |
d |
|
|
|||
|
|
|
|
|
||
dt |
|
|
|
|||
|
|
|
|
|
||
где МС – суммарный момент сил сопротивления, приведённый к валу гидродвигателя;
J∑ - суммарный момент инерции, равный сумме моментов инерции самого двигателя и приведённых моментов инерции ПМ и ИМ.
Для гидроцилиндра:
1.Q |
A |
|
|
k |
|
|
Т |
|
|
|
|
||
П |
|
|
ц |
p 1 |
р; |
|
|||||||
С |
|
|
|
|
|
уц |
|
|
|
|
|||
2.F AП p; |
|
|
|
|
|
|
|
|
(1.52) |
||||
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
d |
|
|
|
|
|
|
|
3.F F |
m |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|||||
|
С |
|
|
|
|
dt |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
||||
где по аналогии с (1.51) FC и m∑ - суммарная сила сопротивления на штоке гидроцилиндра и масса поступательно движущихся элементов привода.
Соответствующие структурные схемы гидропривода представлены на рисунке 1.13.

39
|
|
|
|
|
|
|
|
|
|
|
|
|
|
w |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
QД |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ω |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Q |
|
|
|
|
1/ K ут |
p |
|
|
|
M |
|
|
|
|
|
|
1 |
|
|
|
|
|
|||||||||
|
|
|
|
|
|
w |
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
J p |
|
|
|
||||||
|
|
|
|
|
|
|
|
Тг p 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Mc |
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
a) |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
AП |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
QЦ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
υ |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Q |
|
1/ K уц |
|
|
|
p |
|
|
|
|
F |
|
|
|
|
|
|
1 |
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
AП |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
Тц p 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
m p |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Fc |
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
б) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Рисунок 1.13. - Структурные схемы гидропривода вращательного движения (а), поступательного движения (б)
При представлении механической части двухмассовой системой, уравнения движения для гидродвигателя запишутся в виде:
Qc w 1 K ут(Tг p 1); M w p; |
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
d |
|
|
|
|
|
|
|
|
|
|
|
d |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
||
М M |
c1 |
M |
12 |
J |
1 |
1 |
; M |
12 |
M |
c2 |
|
J |
2 |
|
; |
(1.53) |
|||||||||
|
|
|
|||||||||||||||||||||||
dM |
|
|
|
|
|
dt |
|
|
|
|
|
|
|
dt |
|
|
|||||||||
12 |
|
C |
( |
|
|
); M |
|
|
C |
( |
|
|
); |
|
|
|
|
||||||||
|
|
2 |
12 |
2 |
|
|
|
|
|||||||||||||||||
dt |
|
|
|
||||||||||||||||||||||
|
12 |
|
1 |
|
|
|
|
|
12 |
|
1 |
|
|
|
|
|
|
||||||||
где φ1, φ2 и ω1, ω2 – углы поворота и скорости первой J1 и второй J2
инерционных масс привода соответственно;
С12 – коэффициент жесткости упругой связи между массами;
М12 – момент упругой связи.
Для гидроцилиндра:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
40 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Qc AП K уц( Tц p 1 ); F AП p; |
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d |
|
|
|
|
|
|
|
d |
|
|
(1.54) |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
2 |
|
||||||
|
|
|
|
F F |
|
F |
|
m |
|
|
|
; F |
F |
m |
|
|
|
|
; |
|||||||||
|
|
|
|
|
|
|
dt |
|
|
|
dt |
|
||||||||||||||||
|
|
|
|
dF |
|
c1 |
12 |
|
|
1 |
|
|
|
12 |
c1 |
|
|
|
2 |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
12 |
|
C' |
( |
1 |
|
2 |
); F C' ( S |
1 |
S |
2 |
); |
|
|
|||||||||||
|
|
|
dt |
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
12 |
|
|
|
|
|
12 |
12 |
|
|
|
|
|
|
|
|
||||||
где S |
, S |
2 |
и , |
|
2 |
- перемещения и скорости первой m1 и второй m2 масс |
||||||||||||||||||||||
1 |
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
гидропривода;
С/12 – коэффициент жесткости при растяжении, сжатии;
F12 – усилие в упругой связи;
Fc1,Fc2 – силы сопротивления движению первой и второй масс.
Структурные схемы гидропривода вращательного и поступательного движения приведены на рисунках 1.14, 1.15.
|
|
|
|
|
|
|
|
|
|
|
w |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Мс2 |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
QД |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Мс1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ω2 |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
p |
|
|
|
М |
|
|
|
|
ω1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
QC |
|
|
|
|
1 К |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
М |
12 |
|
|
|
|
|
1 |
|
|
|
2 |
|
||||||||
|
|
|
|
ут |
|
|
1 |
|
C12 |
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
w |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
J2 p |
|
|
|
|
|
|||||||||
|
|
|
|
|
|
Тг p |
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
J p |
|
|
|
|
ω2 |
p |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
М12 |
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рисунок 1.14 - Структурные схемы гидропривода вращательного движения при учете упругих механических связей
|
|
|
|
|
|
|
|
|
|
|
АП |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
FC2 |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
QЦ |
|
|
|
|
|
|
|
|
|
|
|
FC1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
υ2 |
|||||||
|
|
|
|
|
|
|
|
|
p |
|
|
|
|
F |
|
|
|
|
|
|
|
|
|
|
|
υ1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
QC |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
F12 |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
||||||||||||
|
|
|
|
|
1/ K уц |
|
|
|
АП |
|
|
|
|
|
|
|
|
|
1 |
|
|
|
C12 |
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
m p |
|
|
|
|
|
|
p |
|
|
|
|
|
|
|
m2 p |
|
|
|
||||||
|
|
|
|
|
|
Тц p 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
F12 |
|
|
|
|
|
|
1 |
|
|
υ2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рисунок 1.15 - Структурные схемы гидропривода поступательного движения при учете упругих механических связей