


|
|
|
|
|
|
|
|
69 |
|
|
|
|
|
Структурная схема модели, соответствующая (2.21), приведена на рисунке |
|||||||||
2.9,б. |
|
|
|
|
|
|
|
|
|
|
|
2.3 Регуляторы давления |
|
|
|
|
|
|
|||||
|
|
Регуляторы давления делятся на переливные и редукционные, |
|||||||||
предназначен- |
|
|
|
|
|
|
|
|
|||
ные |
поддерживать |
давление |
в |
4 |
3 |
5 |
z |
||||
полостях |
гидросистемы в |
заданном |
|
|
|
|
|||||
диапазоне от расхода, а также |
|
|
|
|
|||||||
предохранительные (ограничивающие |
|
|
|
z |
|||||||
в |
безопасных |
пределах |
давление |
2 |
|
|
|||||
|
|
|
|||||||||
жидкости). |
|
|
|
|
1 |
|
|
|
|||
|
|
На |
рисунке |
2.10 |
приведена |
|
|
|
|
||
простейшая конструкция шарикового |
|
|
|
|
|||||||
типа, поясняющая принцип действия |
|
Рисунок 2.10 |
|
||||||||
регуляторов давления. Насос 2 подаёт |
|
|
|
|
|||||||
масло из резервуара 1 в гидросистемы по трубопроводу 5. Давление масла |
|||||||||||
действует на шарик 3, прижатый к седлу пружиной 4. Когда давление масла |
|||||||||||
превышает усилия пружины, шарик отходит влево и жидкость через |
|||||||||||
образовавшуюся щель сливается в резервуар, причём вследствие дросселирования |
|||||||||||
потока давление в трубопроводе поддерживается постоянным. |
|
|
|||||||||
|
|
Схемы, конструкции и характеристики регуляторов различного назначения |
|||||||||
приводится в [2, 12]. |
|
|
|
|
|
|
|
||||
2.4 Электрогидравлический усилитель мощности
Электрогидравлические усилители (ЭГУ) регулируют мощность потока жидкости по электрическим сигналам, поступающим в системы управления (СУ)

70
приводом. Связь гидравлической части ЭГУ с электрической частью СУ осуществляется с помощью электромеханических преобразователей (ЭМП), обмотки управления которых служат нагрузкой для выходных усилителей СУ, а подвижный якорь связан с дросселирующим гидрораспределителем, управляющим потоком жидкости, подводимой к ГД. Следовательно, любой ЭГУ включает в себя ЭМП и дросселирующий гидравлический распределитель.
2.4.1 Электромеханические преобразователи
Наибольшее применение среди ЭМП нашли электродинамические и электромагнитные преобразователи поступательного и вращательного движения. На рисунке 2.8,а приведена схема электродинамического преобразователя. Перемещение якоря ЭМП осуществляется за счет взаимодействия магнитного
потока Φп , создаваемого обмоткой подмагничивания, и потока Φу , создаваемого обмоткой управления.
а) |
б) |
Рисунок 2.11 |
- Электромеханические преобразователи: а) поступательного |
|
движения; б) вращательного движения |
На рисунке 2.11,б приведена схема электромагнитного ЭМП поворотного движения с обмотками поляризации, управляемого постоянным током.
Электрическая часть ЭМП электромагнитного типа описывается уравнениями:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
71 |
|
|
|
|
|
|
|
|
||
|
|
U |
у |
R i |
у |
L |
|
diу |
k |
пэ |
d я |
; |
|
U |
у |
R i |
у |
L |
diу |
k dx , |
||||
|
|
|
|
|
|
dt |
||||||||||||||||||
|
|
|
к |
|
к dt |
|
dt |
|
к |
к |
пэ dt |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(2.22) |
|
|
|
|
|
|
|
|
||
|
|
где Uу, iу – напряжение, ток в катушке управления; |
|
|
||||||||||||||||||||
Rк, Lк – сопротивление, индуктивность катушки управления; |
|
|
||||||||||||||||||||||
k |
пэ |
,k - коэффициенты противо-ЭДС для углового и линейного перемещения |
||||||||||||||||||||||
|
пэ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
якоря ЭМП. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
При переходе к операторной форме записи уравнений (2.22) можно |
||||||||||||||||||||||
получить передаточную функцию электрической части ЭМП: |
|
|
||||||||||||||||||||||
|
|
|
W э |
|
|
|
iу p |
|
|
|
|
Кэмп |
|
, |
|
|
|
|
|
(2.23) |
||||
|
|
|
U |
|
p e p |
T р 1 |
|
|
|
|
|
|||||||||||||
|
|
|
|
эмп |
|
у |
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
э |
|
|
|
|
|
|
|
|||
где Кэмп - коэффициент усиления,
Кэмп 1 ;
Rк
Тэ – постоянная времени ЭМП,
Тэ Lк .
Rк
Без учета противо-ЭДС, передаточная функция примет вид:
W э |
|
i |
у |
р |
|
|
К |
э |
|
. |
(2.24) |
||||
|
|
|
|
|
|
|
|
||||||||
U |
|
|
р |
Т |
|
р 1 |
|||||||||
эмп |
|
у |
|
э |
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Структурная схема электрической части ЭМП показана на рисунке 2.12.
72
Момент и сила, приложенные к якорю ЭМП, определяются:
М kмiу сэмп я; F kF iу сэмпx ,
где сэмп, сэмп - коэффициенты, характери-
зующие жесткость магнитной пружины.
|
|
|
|
Движение механической части ЭМП |
|
|
|
|
|
|
Рисунок 2.12 - Структурная |
||||||||||||||||||||||||||||||||||||
описывается уравнениями: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
схема электрической части ЭМП |
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
k |
|
i |
у |
|
c |
эмп |
|
с |
п |
|
я |
|
|
d я |
J |
|
d 2 я |
|
; |
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
dt2 |
|||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
м |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
эмп dt |
|
|
|
1 |
|
|||||||||||||||||||
|
|
|
|
|
|
k |
|
|
i |
|
|
|
|
|
|
|
с |
|
|
Х |
|
|
dx |
m |
d 2 x |
, |
|
|
(2.25) |
||||||||||||||||||
|
|
|
|
|
|
F |
у |
c |
эмп |
п |
|
эмп dt |
dt2 |
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
||||||||||||||||||||
|
|
|
|
где J1, m1 – момент инерции и масса якоря; |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
эмп |
, |
|
- коэффициенты вязкого трения; |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
|
|
эмп |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
с |
п |
, с - коэффициенты жесткости механической пружины ЭМП. |
|||||||||||||||||||||||||||||||||||||||||||||
|
п |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
Передаточные функции механической части ЭМП, связывающие φя(р) с |
|||||||||||||||||||||||||||||||||||||||||||
iя(р) и x(р) с iу(р) на основании (2.25), запишутся в следующем виде: |
|||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
W |
м |
|
|
|
р |
|
я |
р |
|
|
|
|
|
|
Кэм |
|
|
|
|
|
; |
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
эмп |
|
|
|
|
|
i |
у |
р |
|
Т2 |
|
р2 2 |
|
|
Т |
эм |
р 1 |
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
эм |
|
|
|
эм |
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x р |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
W м р |
|
|
|
|
|
|
|
|
|
|
|
|
|
Кэм |
|
|
|
|
|
|
|
|
, |
|
|
(2.26) |
|||||||||||||||
|
|
|
|
|
|
|
iу р |
|
|
|
2 |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
эмп |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Т |
эм |
р |
|
2 эмТ |
эм |
р 1 |
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
73 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где |
Т |
|
|
J |
|
c |
|
|
с |
|
|
; |
|
Т |
|
|
|
m |
|
|
|
с |
|
; |
|
|
|||||||
|
|
|
эм |
1 |
эмп |
п |
|
эм |
c |
эмп |
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
п |
|
|
|
||||||||||||
|
|
|
|
|
эмп |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
kм |
|
|
|
||||
|
эм |
|
|
|
|
|
|
; |
|
|
|
|
|
эмп |
|
|
|
|
; |
К |
эм |
|
|
|
|
; |
||||||||||
2 J |
|
|
с |
|
) |
|
|
|
|
|
|
|
|
|
с |
|
с |
|
||||||||||||||||||
|
|
1 |
( c |
эмп |
п |
|
|
эм |
|
2 |
m |
|
|
|
с |
|
|
|
эмп |
|
п |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
c |
эмп |
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
п |
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
К |
|
|
|
|
|
kF |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
эм |
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
с |
|
с |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
эмп |
|
|
п |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
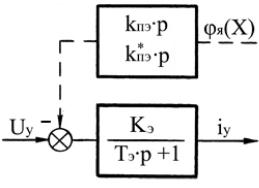
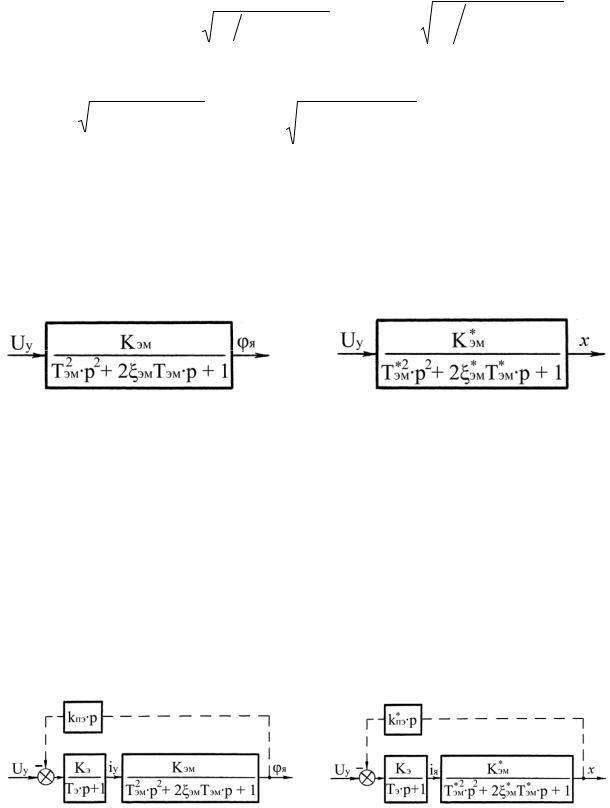
Структурные схемы механической части ЭМП приведены на рисунке 2.13.
а) |
б) |
Рисунок 2.13 - Структурные схемы механической части ЭМП: а) вращательного движения; б) поступательного движения
Следовательно, динамические структурные схемы ЭМП (рисунок 2.14) без учета противо-ЭДС (показана пунктирной линией) изображаются двумя последовательно соединенными звеньями с передаточными функциями
Wэмпэ р , Wэмпм р .
а) |
б) |
Рисунок 2.14 - Структурные схемы ЭМП: а) вращательного движения; б)поступательного движения