

11Мгновенный центр скоростей (мцс). Способы нахождения.
В любой момент времени при плоском движении фигуры существует единственная точка фигуры, скорость которой равна нулю. Эту точку называют мгновенным центром скоростей (МЦС). Найдем эту точку, обозначив ее Р.
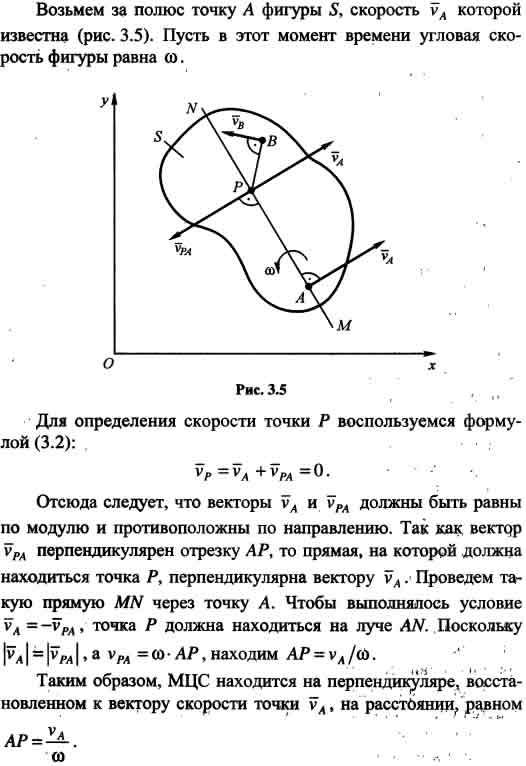
Примем
точку Р за полюс фигуры. Тогда для ее
произвольной точки В можно записать:![]() ,
где PB — расстояние от МЦС — точки Р до
точки В; вектор vB перпендикулярен отрезку
РВ, направлен в сторону вращения фигуры
вокруг МЦС (см. рис. 3.5), а его модуль
пропорционален расстоянию от МЦС до
точки.
,
где PB — расстояние от МЦС — точки Р до
точки В; вектор vB перпендикулярен отрезку
РВ, направлен в сторону вращения фигуры
вокруг МЦС (см. рис. 3.5), а его модуль
пропорционален расстоянию от МЦС до
точки.
Таким образом, скорости точек плоской фигуры в данный момент времени вычисляются так же, как если бы фигура вращалась вокруг неподвижной оси, проходящей через МЦС перпендикулярно плоскости движения, с той же угловой скоростью "омега".
При определении
положения МЦС скорость любой точки
может быть записана: VM=VCV+VMCV, где точка СVвыбрана за полюс.
Поскольку это МЦС и VCV=0 , то
скорость любой точки определяется как
скорость вращении вокруг мгновенного
центра скоростей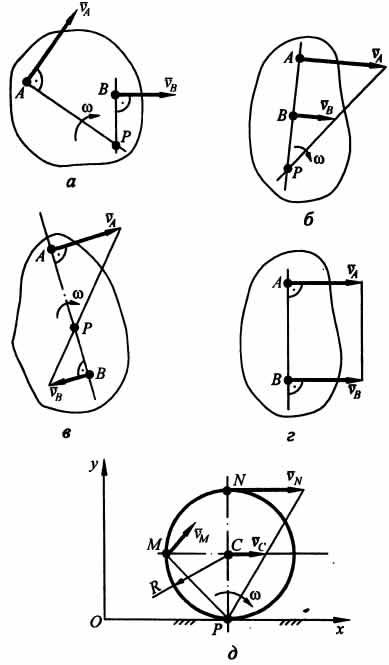
12Условия равновесия системы сходящихся сил
|
Пусть на свободное твердое тело действует система сходящихся сил (F1, F2, ... FN). Сложив по правилу силового многоугольника N-1 этих сил, приведем данную систему сходящихся сил к системе двух сил (R1, FN). Но, по первой аксиоме, две силы R1 и FN приложенные к твердому телу, эквивалентны нулю, т.е. находятся в равновесии только в том случае, когда они имеют равные модули и направлены по одной прямой в противоположные стороны, т.е. если их равнодействующая R*= R1 + FN равна нулю. Следовательно, для равновесия системы сходящихся сил необходимо и достаточно, чтобы равнодействующая этой системы сил равнялась нулю, т.е. R* = Σ Fk = 0. (6) Это векторное условие равновесия системы сходящихся сил. Так как равнодействующая R* изображается вектором, замыкающим силовой многоугольник, то геометрически условие равновесия системы сходящихся сил означает, что силовой многоугольник, построенный на векторах слагаемых сил данной системы, замкнут. Выразим теперь это условие аналитически. Из предыдущего параграфа известно, что модуль равнодействующей системы сходящихся сил определяется по формуле
Но при равновесии R*= 0, а следовательно равно нулю и подкоренное выражение формулы (2). Поскольку под знаком корня стоит сумма положительных чисел, то R* может равняться нулю только в случае, если каждое из этих слагаемых равно нулю в отдельности, т.е. ΣFkx = 0, ΣFky = 0 , ΣFkz = 0 . (8) Таким образом, для равновесия пространственной системы сходящихся сил необходимо и достаточно, чтобы алгебраические суммы проекций всех сил на каждую из трех выбранных любым образом координатных осей равнялись нулю. Имея плоскую систему сходящихся сил, всегда можно плоскость, в которой расположены силы, принять за координатную плоскость хОу. Тогда третье условие в формулах (8) выполняется тождественно, и условия равновесия, в рассматриваемом случае, сведутся к двум следующим условиям: ΣFkx = 0, ΣFky = 0. (9) Т.е., для равновесия плоской системы сходящихся сил необходимо и достаточно, чтобы алгебраические суммы проекций всех сил на каждую из двух выбранных любым образом координатных осей, лежащих в плоскости действия сил данной системы, равнялись нулю. |
