

27.Связи и их реакции
Тело, которое может совершать из данного положения любые перемещения в пространстве, называется свободным.
Тело, перемещениям которого препятствуют какие-нибудь другие, скрепленные или соприкасающиеся с ним тела, называется несвободным. Все то, что ограничивает перемещение данного тела, называют связью.
Сила, с которой данная связь действует на тело, препятствующая тем или иным его перемещениям, называется реакцией связи. Реакция связи направлена в сторону противоположную той, куда связь не дает перемещаться телу.
Принцип освобождаемости от связей: несвободное твердое тело можно рассматривать как свободное, если его мысленно освободить от связей, заменив их действие реакциями. В статике этот принцип позволяет рассматривать равновесие несвободного твердого тела как свободного под действием активных (заданных) сил и реакций связей.
Основные типы связей и их реакции
1.
Гладкая (без трения)
плоскость или поверхность. Такие связи
препятствуют перемещениям тела только
в направлении общей нормали в
точке касания, вдоль которой и будет
направлена соответствующая реакция.
Поэтому реакция гладкой плоской опоры
перпендикулярна этой опоре (реакция ![]() на
рис. 12,а); реакция гладкой стенки
перпендикулярна этой стенке
на
рис. 12,а); реакция гладкой стенки
перпендикулярна этой стенке ![]() рис.
12, б); реакция гладкой поверхности
направлена по нормали к этой поверхности,
проведенной в точке касания
рис.
12, б); реакция гладкой поверхности
направлена по нормали к этой поверхности,
проведенной в точке касания ![]() на
рис. 12, в).
на
рис. 12, в).
 Рис.
12.2. Острый выступ. В этом случае можно
считать, что опирается сам выступ, а
опорой служит рассматриваемое тело.
Это приводит к случаю 1 и выводу, что
реакция гладкого выступа направлена
по нормали
к поверхностиопирающегося
тела (сила
Рис.
12.2. Острый выступ. В этом случае можно
считать, что опирается сам выступ, а
опорой служит рассматриваемое тело.
Это приводит к случаю 1 и выводу, что
реакция гладкого выступа направлена
по нормали
к поверхностиопирающегося
тела (сила ![]() на
рис. 12, в).
на
рис. 12, в).
3.
Гибкая связь (невесомые нить, трос, цепь
и т.п.). Соответствующая реакция направлена
вдоль связи от точки крепления нити к
точке подвеса (сила ![]() на
рис. 11,г, сила
на
рис. 11,г, сила ![]() на
рис. 12, б).
на
рис. 12, б).
4.
Невесомый прямолинейный стержень с
шарнирами на концах. Реакция направлена
вдоль стержня. Поскольку стержень может
быть как сжат, так и растянут, реакция
может иметь направление как к точке
подвеса стержня, так и от точки подвеса
(реакции ![]() и
и ![]() на
рис. 13, а).
на
рис. 13, а).
5. Невесомый коленчатый или криволинейный стержень. Реакция направлена вдоль прямой, проходящей через центры концевых шарниров (сила 53 на рис. 13, а; сила S на рис. 13, б).

Рис. 13.
6. Подвижная шарнирная опора. Реакция направлена перпендикулярно плоскости опоры (плоскости катания) (рис. 14, а, б).
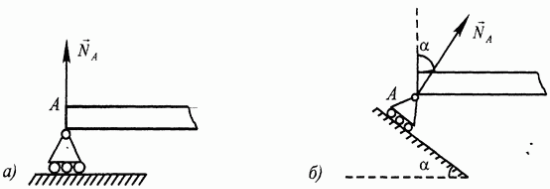
Рис. 14.
7. Цилиндрический шарнир (рис. 15, а), радиальный подшипник (рис. 15, б). Реакция проходит через центр шарнира (центр срединного сечения подшипника) и лежит в плоскости, перпендикулярной оси шарнира (подшипника).
Она
эквивалентна двум неизвестным по модулю
силам - составляющим этой реакции вдоль
соответствующих координатных осей
(силы ![]() на
рис. 15,а;
на
рис. 15,а; ![]() и
и ![]() на
рис. 15, б). (Разъяснения по этому поводу
см. также в примере на стр. 16).
на
рис. 15, б). (Разъяснения по этому поводу
см. также в примере на стр. 16).
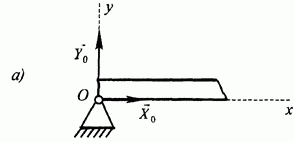

Рис. 15
8. Сферический шарнир (рис. 16, а), подпятник (или радиально-упорный подшипник) (рис. 16, б). Реакция состоит из трех неизвестных по модулю сил - составляющих реакции вдоль осей пространственной системы координат.
9. Жесткая заделка (рис. 17). При действии на тело плоской системы сил полная реакция заделки складывается из силы с составляющими ХА и УА, и пары сил с моментом М, расположенных в той же плоскости, что и действующие силы.
10. Скользящая заделка (рис. 18). В случае плоской системы сил и отсутствия трения реакция состоит из силы N и пары сил с моментом М, расположенных в одной плоскости с действующими силами. Сила N перпендикулярна к направлению скольжения.
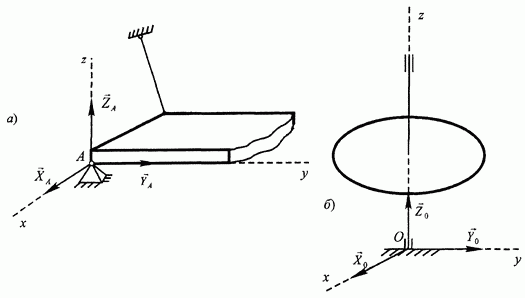
Рис. 16