

13Равновесие при наличии трения скольжения
При скольжении тела по шероховатой поверхности возникает сила реакции, которая имеет две составляющие – нормальную и силу трения скольжения (рисунок 2.1). Сила трения скольжения, приложенная к одному из трущихся тел, направлена противоположно его скорости относительно второго тела.
 Рисунок
2.1
Рисунок
2.1
В результате экспериментальных исследований были установлены законы Амонтона-Кулона:
1) сила трения скольжения находится в общей касательной плоскости соприкасающихся поверхностей тел и направлена в сторону, противоположную направлению возможного скольжения тела под действием активных сил. Величина силы трения зависит от активных сил и заключена между нулем и своим максимальным значением, которое достигается в момент выхода тела из положения равновесия (0 ≤ Fтр ≤ Fтрmax );
2) максимальное значение силы трения скольжения не зависит от площади контакта, а определяется величиной нормальной реакции, материалом и состоянием контактирующих поверхностей;
Fтрmax = fN,
где f – коэффициент трения скольжения, который является безразмерной величиной и зависит от материала и физического состояния трущихся поверхностей, а также от скорости движения тела и удельного давления.
Экспериментально установлено, что f < fсц.
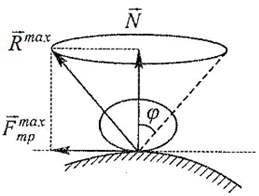
Рассмотрим твердое тело на шероховатой поверхности (рисунок 2.2), находящееся под действием активных сил в предельном состоянии равновесия, т.е. когда сила трения достигает своего наибольшего значения при данном значении нормальной реакции.
В этом случае полная реакция шероховатой поверхности отклонена от нормали к общей касательной плоскости трущихся поверхностей на наибольший угол (Rmax ). Этот наибольший угол между полной реакцией, построенной на наибольшей силе трения при данной нормальной реакции и направлением нормальной реакции, называется углом трения φ:
tgφ = Fтрmax/N = fN/N = f.
 Рисунок
2.2
Рисунок
2.2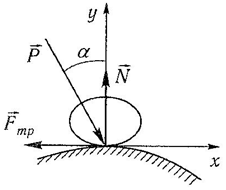 Рисунок
2.3
Рисунок
2.3
Конус трения – поверхность, образованная линией действия максимальной реакции опорной поверхности при движении тела в различных направлениях (рисунок 2.2).
При равновесии тела на шероховатой поверхности под действием силы P (рисунок 2.3) можно составить два уравнения равновесия:
ΣFkx = 0; Psinα - Fтр = 0;
ΣFky = 0; - Pcosα + N = 0.
Следовательно,

Для равновесия тела на шероховатой поверхности необходимо и достаточно, чтобы линия действия равнодействующей активных сил, действующих на тело, проходила внутри конуса трения или по его образующей через его вершину.
Никакая сила, лежащая внутри конуса трения, не может вывести тело из состояния равновесия.
14Основная теорема статики
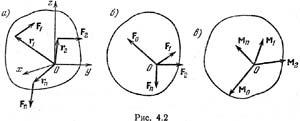
Пусть дана произвольная система сил (F1, F2,..., Fn). Сумму этих сил F=åFkназывают главным вектором системы сил. Сумму моментов сил относительно какого-либо полюса называют главным моментом рассматриваемой системы сил относительно этого полюса.
Осн теор статики (теорема Пуансо):Всякую пространственную систему сил в общем случае можно заменить эквивалентной системой, состоящей из одной силы, приложенной в какой-либо точке тела (центре приведения) и равной главному вектору данной системы сил, и одной пары сил, момент которой равен главному моменту всех сил относительно выбранного центра приведения.Пусть О — центр приведения, принимаемый за начало координат, r1,r2, r3,…, rn–соответствующие радиусы-векторы точек приложения сил F1, F2, F3, ...,Fn, составляющих данную систему сил (рис. 4.2, а). Перенесем силы F1, Fa, F3, ..., Fnв точку О. Сложим эти силы как сходящиеся; получим одну силу: Fо=F1+F2+…+Fn=åFk, которая равна главному вектору (рис. 4.2, б). Но при последовательном переносе сил F1, F2,..., Fnв точку О мы получаем каждый раз соответствующую пару сил (F1, F”1), (F2,F”2),...,(Fn, F"n).Моменты этих пар соответственно равны моментам данных сил относительно точки О: М1=М(F1,F”1)=r1x F1=Мо(F1), М2=М(F2, F”2)=r2 x F2=Мо(F2), …, Мп=М(Fn, F"n)=rnx Fn=Мо(Fn). На основании правила приведения системы пар к простейшему виду все указанные пары можно заменить одной парой. Ее момент равен сумме моментов всех сил системы относительно точки О, т. е. равен главному моменту, так как согласно формулам (3.18) и (4.1) имеем (рис. 4.2, в) М0=М1+М2+...+Мn=Мо(F1)+Мо(F2)+…+ Мо(Fn)==åМо(Fk)=årkx Fk. Систему сил, как угодно расположенных в пространстве, можно в произвольно выбранном центре приведения заменить силой Fo=åFk(4.2) и парой сил с моментом M0=åM0(Fk)=årk x Fk. (4.3). В технике очень часто проще задать не силу или пару, а их моменты. Например, в характеристику электромотора входит не сила, с которой статор действует на ротор, а вращающий момент.