

9.5 Преобразование уравнений погрешностей
Для упрощения вычислений непреобразованные уравнений погрешностей (т.е. уравнения с ориентирными поправками z) преобразовывают на основании теории эквивалентных уравнений. Эти преобразования позволяют сократить число уравнений погрешностей и число входящих в них неизвестных.
9.5.1 Исключение ориентирных поправок.
Вес измеренного направления (непреобразованного уравнения погрешностей) примем равным ½. Для каждого наблюдаемого пункта записывают группу уравнений с общеориентирной поправкой z.
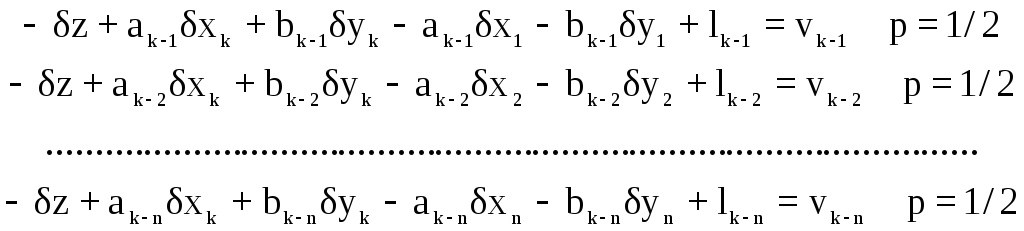
Если один или несколько пунктов являются исходными, то поправки в координаты этих пунктов равны нулю. На основании 1-го правила Шрейбера исключаем ориентирную поправку z из п уравнений, заменив ее эквивалентной системой п+1 уравнений:

В этой системе уравнений поправки v’k-i уже не являются поправками к измеренным направлениям, а численно равны v’k-i = vk-i + zk. Учитывая, что
![]()
и [lk-i] = 0, на основании третьего положения теории эквивалентных уравнений последнее суммарное уравнение заменим на уравнение
![]()
Аналогично преобразовывают уравнения погрешностей на остальных наблюдаемых пунктах.
9.5.2 Сложение уравнений взаимных направлений.
Для стороны сети триангуляции между определяемыми пунктами k и i в случае двустороннего визирования после исключения ориентирных поправок получим два уравнения, которые отличаются только свободными членами:
![]()
На основании второго положения теории эквивалентных уравнений эти уравнения могут быть заменены одним уравнением:
![]()
где
![]() .
.
9.5.3 Приведение уравнений погрешностей к весу, равному 1.
Теперь только уравнения для сторон с односторонним визированием и суммарные уравнения будут иметь веса, не равные 1. Их можно привести к весам, равным 1 или –1. Согласно третьему положению теории эквивалентных уравнений такие уравнения можно заменить на эквивалентные с весом 1 или –1.
a x + b y + … + l = v с весом р
на
![]() с
весом р = 1.
с
весом р = 1.
9.6 Составление преобразованных уравнений погрешностей
На основании правил составления эквивалентных уравнений погрешностей можно сформулировать правила составления преобразованных уравнений погрешностей:
1-е правило. Стороне сети между определяемыми пунктами k и i соответствует уравнение погрешностей:
а) в случае двустороннего визирования:
![]()
б) в случае одностороннего визирования с пункта k на пункт i:
![]() .
.
2-е правило. Стороне сети между определяемым пунктом k и исходным пунктом i соответствует уравнение погрешностей:
а) в случае двустороннего визирования:
![]()
б) в случае одностороннего визирования с пункта k на пункт i:
![]() .
.
3-е правило. Каждому отнаблюденному пункту k отвечает суммарное уравнение с отрицательным весом:
![]()
При этом на исходном пункте k в суммарных уравнениях отсутствуют два первых слагаемых с коэффициентами [ak-i] и [bk-i].
Общее число уравнений погрешностей равно числу сторон в сети (не считая сторон между исходными пунктами) плюс общее число отнаблюденных пунктов. В преобразованных уравнениях погрешностей неизвестными являются поправки в координаты определяемых пунктов. Количество неизвестных равно удвоенному числу определяемых пунктов.