

§5 Циліндричні поверхні з твірними, паралельними координатним осям; поверхні другого порядку
Перш ніж почати вивчення просторових геометричних образів, відповідних рівнянням 2-го степеню, розглянемо один спеціальний клас поверхонь, які називаються циліндричними поверхнями.
Визначення. Циліндричною поверхнею називається поверхня, утворена рухом прямої, що перетинає задану лінію і паралельну заданому напрямку.
Задана лінія, через точки якої проходить пряма, яка переміщується, називається направляючою, а кожне положення такої прямої називається твірною розглядуваної циліндричної поверхні.
Виберемо координатну систему так, щоб одна із осей, наприклад z, була паралельною заданому напрямку і будемо розглядати той, хоча і частинний, але дуже важливий випадок, коли направляюча лінія лежить в площині, перпендикулярній заданому напрямку. Тоді без всякого обмеження загальності дослідження можливо вважати, що направляюча лежить в площині ху.
Нехай в площині z=0 рівняння направляючої має вигляд F(х,у)=0 , і , таким чином, така лінія задана двома рівняннями
Z=0, F(x;y)=0 (1)
Доведемо, що циліндричній поверхні, що розглядається, відповідає рівняння
F(x;y)=0 (2)
тобто, що координати будь-якої точки поверхні відповідають рівнянню (2), а координати будь-якої точки, що не лежить на цій поверхні, йому не відповідають.
Нехай М0(х0;у0;0) - будь-яка точка направляючої (рис. 26).
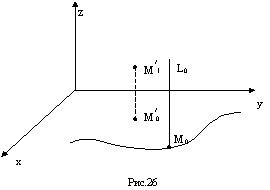
Проведемо через М0 пряму L, паралельну осі z, і виберемо на ній довільну точку М1. Координати цієї точки (х0;у0;z1). Згідно припущенню координати точки М0 відповідають системі Z=0, F(x;y)=0. Отже, F(x0;y0)=0 і координати точки М1 (при будь-якому z1) відповідають рівнянню F(x;y)=0. Таким чином, координати будь-якої точки М1 прямої L відповідають рівнянню F(x;y)=0. Але М0 - довільна точка направляючої. Отже координати будь-якої точки будь-якої твірної; тобто координати будь-якої точки циліндричної поверхні, що розглядається, відповідають рівняннюF(x;y)=0.
Нехай
тепер вибрана будь-яка точка М1' (х1' ;
у1' ;
z1' ),
що не лежить на циліндричній поверхні,
що розглядається. Розглянемо
точку М0' (х1' ;
у1';0), що
є проекцією точки М1' на
площину ху.
ТочкаМ0'
не лежить на заданій направляючій лінії
(інакше кажучи, точка М1' лежала
б на заданій поверхні). А тому координати
точки М0' не
можуть задовольняти системі рівнянь Z=0,
F(x; y)=0.
Але перше рівняння напевно виконано.
Отже![]() .
Але це означає, що координати точки М1' (х1';
у1';
z1' ) не
можуть задовольняти рівнянню F(x;
y)=0;
тим самим наше твердження доведено.
.
Але це означає, що координати точки М1' (х1';
у1';
z1' ) не
можуть задовольняти рівнянню F(x;
y)=0;
тим самим наше твердження доведено.
Очевидно, що якщо твірні циліндричної поверхні паралельні осі у, а рівняння направляючої має вигляд
у=0, F(x;z)=0,
то рівняння циліндричної поверхні F(x; z)=0.
Аналогічно для циліндричної поверхні, твірні якої паралельні осі х, маємо рівняння F(y; z)=0
Якщо направляюча є коло, яке лежить в площині ху, з центром в точці (a;b;0) і радіусом R, а твірні паралельні осі z, тоді рівняння циліндричної поверхні має вигляд:
(x-a)2+(y-b)2=R2 (3)
Називається така поверхня круговим циліндром.
Поверхня
![]() (4)
(4)
є циліндрична поверхня, твірні якої паралельні осі z, а направляючими є еліпс з напівосями a і b, з центром на початку координат, розташований в площині ху. Поверхня така називаєтьсяеліптичним циліндром.
Круговий циліндр можна, звичайно, розглядати як частинний випадок еліптичного циліндра.
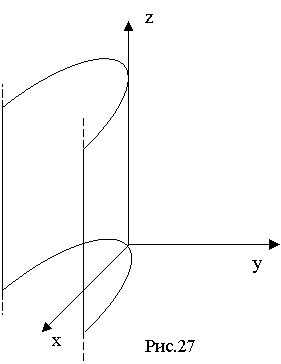
Поверхня, визначена рівнянням
y2=2px (5),
називається параболічним циліндром (рис.27).
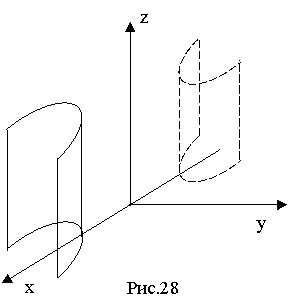
Поверхня, визначена рівнянням
![]() (6),
(6),
називається гіперболічним циліндром (рис.28)
Крім вже приведених існують ще 6 типів поверхонь 2-го порядку. Їх найпростіші, або, як прийнято говорити, канонічні рівняння, одержані при найбільш зручному для вивчення поверхонь розташуванні осей координат, мають вигляд:
![]() -
еліпсоїд
-
еліпсоїд
![]() -
однопорожнинний гіперболоїд
-
однопорожнинний гіперболоїд
![]() -
двопорожнинний гіперболоїд
-
двопорожнинний гіперболоїд
![]() -
еліптичний параболоїд
-
еліптичний параболоїд
![]() -
гіперболічний параболоїд
-
гіперболічний параболоїд
![]() -
конус 2-го порядку
-
конус 2-го порядку
Проведемо дослідження форми цих поверхонь, використовуючи метод, який називають методом паралельних перерізів.