

2.2. Задача про миттєву швидкість
Розглянемо
нерівномірний прямолінійний рух тіла,
що розпочинається в момент часу ![]() .
Вважатимемо, що шлях, подоланий тілом
за час
.
Вважатимемо, що шлях, подоланий тілом
за час ![]() ,
дорівнює
,
дорівнює ![]() .
Функція
.
Функція ![]() називаєтьсязаконом
руху тіла.
називаєтьсязаконом
руху тіла.
Шлях ![]() ,
який подолає тіло за відрізок часу
,
який подолає тіло за відрізок часу ![]() ,
знаходиться як
,
знаходиться як
![]()
Середньою
швидкістю ![]() руху
за проміжок часу
руху
за проміжок часу ![]() називається
відношення
називається
відношення
![]()
в якому легко пізнати диференціальне відношення.
Миттєвою
швидкістю руху ![]() в
момент
в
момент ![]() називається границя
цього відношення,
якщо
називається границя
цього відношення,
якщо ![]() ,
тобто
,
тобто
![]() .
.
Отже, похідна від шляху за часом дорівнює миттєвій швидкості прямолінійного руху тіла.
2.3. Задачі про витрати виробництва та виручку
Нехай ![]() -
витрати виробництва однорідної продукції
– деяка функція кількості продукції х.
Зазначимо, що кількості продукції
-
витрати виробництва однорідної продукції
– деяка функція кількості продукції х.
Зазначимо, що кількості продукції ![]() відповідають
витрати виробництва продукції
відповідають
витрати виробництва продукції ![]() .
Отже, диференціальне відношення, що
характеризує середній приріст витрат
виробництва,
.
Отже, диференціальне відношення, що
характеризує середній приріст витрат
виробництва,
![]()
Воно відбиває приріст витрат виробництва на одиницю приросту кількості продукції.
Границя
![]()
називається граничними витратами виробництва.
Нехай ![]() -
виручка від продажу х одиниць
товару. Міркування, аналогічні до
попередніх, приводять до границі
-
виручка від продажу х одиниць
товару. Міркування, аналогічні до
попередніх, приводять до границі
![]()
яку називають граничною виручкою.
§3. Правила диференціювання
3.1 Диференціювання суми, добутку й частки
Теорема
1. Якщо
функції ![]() і
і ![]() диференційовані
в точці х,
то функції
диференційовані
в точці х,
то функції ![]() (в
останньому випадку припускається, що
(в
останньому випадку припускається, що ![]() )
також диференційовані в цій точці і
мають місце формули:
)
також диференційовані в цій точці і
мають місце формули:
а) ![]() ;
;
б) ![]() ;
;
в) ![]() .
.
Доведення. а)
Надамо х деякого
приросту ![]() .
Тоді функції
.
Тоді функції ![]() і
і ![]() матимуть
прирости
матимуть
прирости ![]() і
і ![]() ,
а функція
,
а функція ![]() -
приріст
-
приріст ![]() .
І, отже,
.
І, отже,
![]()
тобто
функції ![]() дійсно
диференційовані в точці х ,
і має місце формула а).
дійсно
диференційовані в точці х ,
і має місце формула а).
б)
Надамо х деякого
приросту ![]() .
Тоді функції
.
Тоді функції ![]() і
і ![]() матимуть
прирости
матимуть
прирости ![]() і
і ![]() ,
а функція
,
а функція ![]() -
приріст
-
приріст
![]()
І, отже,
![]()
Зазначимо,
що функція ![]() неперервна
в точці х,
оскільки вона диференційована в цій
точці, а тому
неперервна
в точці х,
оскільки вона диференційована в цій
точці, а тому ![]() при
при ![]() .
Переходячи до границі при
.
Переходячи до границі при ![]() в
останній рівності, отримаємо
в
останній рівності, отримаємо ![]() ,
тобто функція
,
тобто функція ![]() дійсно
диференційована в точці х і
має місце формула б).
дійсно
диференційована в точці х і
має місце формула б).
в)
Надамо х деякого
приросту ![]() ,
тоді функція
,
тоді функція ![]() і
і ![]() матимуть
прирости
матимуть
прирости ![]() і
і ![]() ,
а функція
,
а функція ![]() -
приріст
-
приріст
![]()
Переходячи
до границі при ![]() в
останній рівності, отримаємо
в
останній рівності, отримаємо ![]() ,
тобто функція
,
тобто функція ![]() дійсно
диференційована в точці х і
має місце формула в).
дійсно
диференційована в точці х і
має місце формула в).
Наслідок. Припустимо,
у формулі б) ![]() ,
тоді
,
тоді ![]() і
і ![]() ,
тобто сталий співмножник можна виносити
за знак похідної.
,
тобто сталий співмножник можна виносити
за знак похідної.
3.2. Диференціювання складної функції
Теорема
2. Нехай ![]() -
складна функція, де
-
складна функція, де ![]() і
і ![]() -
диференційовані функції своїх аргументів.
Точніше, зовнішня функція
-
диференційовані функції своїх аргументів.
Точніше, зовнішня функція ![]() в
точці
в
точці ![]() має
похідну (по U)
має
похідну (по U) ![]() ,
а внутрішня функція
,
а внутрішня функція ![]() у
точці х має
похідну (по х)
у
точці х має
похідну (по х) ![]() .
Тоді складна функція
.
Тоді складна функція ![]() -
диференційована в точці х,
причому її похідна обчислюється за
формулою
-
диференційована в точці х,
причому її похідна обчислюється за
формулою
![]()
або коротко
![]() чи
чи ![]()
Доведення. Надамо х деякого
приросту ![]() .
Тоді функція
.
Тоді функція ![]() дістане
приріст
дістане
приріст ![]() ,
а функція
,
а функція ![]() -
приріст
-
приріст ![]() .
.
За
умови ![]() маємо
маємо
![]()
Переходячи
в цій рівності до границі при ![]() ,
отримаємо
,
отримаємо
![]()
що й потрібно довести.
При
доведенні враховано, що функція ![]() неперервна
в точці х,
оскільки вона диференційована в цій
точці і, отже,
неперервна
в точці х,
оскільки вона диференційована в цій
точці і, отже, ![]() при
при ![]() .
.
Зауваження. Припущення,
що досить малому ![]() відповідає
відповідає ![]() ,
звичайно ж, істотне. Проте, якщо трапиться,
що
,
звичайно ж, істотне. Проте, якщо трапиться,
що ![]() (до
речі, цей випадок зустрічається рідко),
то формулу диференціювання складної
функції неважко встановити трохи іншим
шляхом.
(до
речі, цей випадок зустрічається рідко),
то формулу диференціювання складної
функції неважко встановити трохи іншим
шляхом.
Наслідок. (диференціювання
оберненої функції). Нехай функція ![]() обернена
по відношенню до функції
обернена
по відношенню до функції ![]() ,
причому функції
,
причому функції ![]() і
і ![]() мають
похідні відповідно в точках х і
мають
похідні відповідно в точках х і ![]() .
Встановимо зв’язок між похідними
.
Встановимо зв’язок між похідними ![]() і
і ![]() .
.
Оскільки ![]() при
всіх х,
то за правилом диференціювання складної
функції похідні від обох частин цієї
рівності
при
всіх х,
то за правилом диференціювання складної
функції похідні від обох частин цієї
рівності ![]() ,
звідки
,
звідки ![]() або
коротко
або
коротко ![]() чи
чи  .
.
Останні
формули мають простий геометричний
зміст. Кутовий коефіцієнт дотичної до
графіка функції ![]() у
точці
у
точці ![]() ,
а кутовий коефіцієнт до графіка
функції
,
а кутовий коефіцієнт до графіка
функції ![]() в
точці
в
точці ![]() (рис.2).
(рис.2).
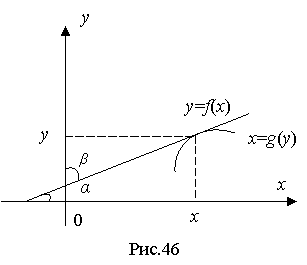
Очевидно,
що ![]() ,
а тому
,
а тому ![]() або
або ![]() .
.