

-
Математические модели движения морских судов
Линеаризованные математические модель МПО в общей форме могут быть представлены в матричном виде:
![]() , ()
, ()
где A, B –матрицы связи, x –собственные координаты системы (ошибка системы, воздействие на объект, выходная координата), δ – вектор воздействия на систему (сигнал задания, помехи).
-
Модель горизонтального движения надводного судна.
Частная модель движения судна в горизонтальной плоскости при отсутствии ветро-волновых возмущений образуется дифференциальным уравнением равновесия моментов относительно вертикальной оси и уравнением связи, а также уравнением равновесия сил относительно поперечной оси. Упрощение уравнений базируется на следующих допущениях:
определяющими являются гидродинамические силы на корпусе и вертикальном руле, которые появляются в результате движения судна в невозмущенной среде;
в любой момент
времени сила тяги компенсирует продольное
гидродинамическое сопротивление и
движение происходит с постоянной
скоростью
![]() ;
;
в качестве
технического средства управления
выступает вертикальный руль, угол
перекладки
![]() которого изменяется в конструктивно
допустимых пределах.
которого изменяется в конструктивно
допустимых пределах.
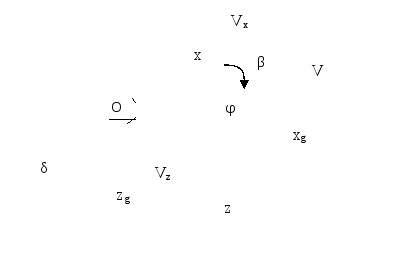
Рис. 2.2. Движение судна в горизонтальной плоскости
Нормальная форма Коши имеет вид:
 (2.25)
(2.25)
Коэффициенты в (2.25) зависят от скорости хода корабля.
В практике расчетов
используются уравнения, записанные в
нормированном (относительном) времени
![]()
Линеаризованные уравнения могут быть записаны в следующей матричной форме:
 (2.26)
(2.26)
где
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() .
.
Эти же уравнения
могут быть выражены через скорость
бокового смещения, используя известное
соотношение
![]() :
:
 (2.27)
(2.27)
где
![]() .
.
Приведенные
уравнения могут быть упрощены: как
правило в них пренебрегают величиной
![]() .
.
Таблица 2.1 Параметры модели движения водоизмещающих судов в горизонтальной плоскости
|
Параметр |
Обозначение |
Варианты судов |
|||||
|
единица |
1 |
2 |
3 |
4 |
5 |
6 |
|
|
Объемное водоизмещение |
V, м3 |
5315 |
5315 |
1050 |
520 |
- |
2930 |
|
Длина по ватерлинии |
L, м |
99,6 |
99,6 |
51 |
39 |
36 |
75,6 |
|
Ширина по миделю |
B, м |
16 |
16 |
9,3 |
7,6 |
8,1 |
15 |
|
Осадка на миделе |
Т м |
5,7 |
4,05 |
4 |
3 |
2 |
4,5 |
|
Коэффициенты |
r21 |
-0,58 |
-0,58 |
-0,59 |
-0.69 |
-0.46 |
-0,59 |
|
r31 |
6,16 |
4,19 |
5,32 |
6,14 |
3,04 |
5,44 |
|
|
q21 |
0,80 |
0,43 |
0,94 |
1,22 |
0,77 |
0,73 |
|
|
q31 |
-7,23 |
-3,58 |
-2,41 |
-3,12 |
-0,80 |
-7.26 |
|
|
s21 |
-0,34 |
-0,34 |
-0,29 |
-0,44 |
-0,18 |
-0.53 |
|
|
s31 |
-3,5 |
-3,5 |
-3,4 |
-3,1 |
-1,52 |
-5,72 |
|
|
h1 |
2,99 |
2,11 |
- |
- |
- |
1,51 |
|