

adambaev_avtomatty
.pdfАвтоматты басқару теориясы
Кейбiр объектiлер к¼псыйымдылыºты болады, я¹ни жо¹ар¹ы реттi дифференциалды те»деумен бейнеленедi. Оларда коэффициент ретiнде бiрнеше уаºыт т½раºтылары комбинациясы болады. Таза транспорттыº кешiгуi бар объектiнi» динамикасы, мына т¾рдегi сызыºтыº дифференциалды те»деумен бейнеленедi:
an
вm
d n x(t ) |
+ a |
|
|
d n-1 x(t ) |
+ ... + a |
dx(t ) |
+ a |
|
|
x(t )= |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
||||
dt n |
|
n |
-1 dt (n-1 ) |
|
|
|
(3.17) |
||||||||
|
1 |
dt |
0 |
|
|||||||||||
d mU (t -t ) |
- в |
|
d m-1U (t -t ) |
+ ... + в |
|
dU (t -t ) |
+ в U (t -t ) |
||||||||
dt m |
|
|
|
||||||||||||
|
|
|
m-1 |
dt m-1 |
1 |
|
|
dt |
0 |
||||||
ì½íäà ¸ðºàøàí n ³ m.
(3.17) дифференциалды те»деулерге, статикалыº объектiлердi» S-т¾рлi ауыспалы процесс ºисыºтары (3.5ә- сурет) с¸йкес келедi.
Статикалыº объектiнi» динамикалыº ºасиеттерiн суреттеу кезiнде де дифференциалдыº те»деулер ºолданылады, бiраº б½л те»деудi» сол жаº б¼лiгiнде à0õ(t) м¾шесi болмайды, ал о» жаº б¼лiгiнде статикалыº берiлiс коэффициентi жоº. Себебi, астатикалыº объектiлер, статикалыº сипаттама¹а ие болмайды (3.5б-сурет).
Тау-кен ¼нерк¸сiбiнi» т¾рлi объектiлердi» динамикалыº сипаттамаларын практика ж¾зiнде ба¹алау т¸жiрибесi, оларды» т¼менде берiлген дифференциалды те»деулерiнi» бiрiмен ½сынылады:
|
a |
|
|
|
dx(t) |
|
+ a |
0 |
x(t )= в |
0 |
×u(t ); |
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
1 |
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
a |
|
|
dx(t ) |
+a |
|
x(t )= в u(t -t ); |
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
1 |
|
|
dt |
|
0 |
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
a |
|
|
|
d 2 x(t ) |
|
+ a |
|
dx(t) |
+ a x(t )= в |
×u(t -t ); |
(3.18) |
|||||||||||||||||||||||
|
|
|
|
dt2 |
|
|
|
|
|
||||||||||||||||||||||||||
|
2 |
|
|
|
|
1 |
|
|
dt |
|
|
0 |
|
0 |
|
|
|
|
|
|
|||||||||||||||
|
a |
|
|
|
d 2 x(t) |
+ a |
|
|
dx(t ) |
+ a |
|
x(t )= в |
du(t -t ) |
+ в ×u(t -t ); |
|||||||||||||||||||||
|
2 dt 2 |
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
1 |
|
dt |
|
|
|
0 |
|
|
|
1 |
dt |
0 |
|||||||||||||||||
a |
d 3 x(t ) |
|
+ a |
|
|
d 2 x(t ) |
+ a |
dx(t ) |
+ a × x(t )= в ×u(t -t ); |
||||||||||||||||||||||||||
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
3 |
|
|
|
dt3 |
|
|
|
2 |
|
|
|
dt2 |
|
|
|
|
1 dt |
|
0 |
|
|
0 |
||||||||||||
a |
|
d 3 x(t ) |
+ a |
|
d 2 x(t ) |
+ a |
dx(t ) |
+ a × x(t )= в |
du(t -t ) |
+ в ×u(t -t ). |
|||||||||||||||||||||||||
|
3 |
|
|
dt3 |
2 dt2 |
1 |
|
|
dt |
0 |
|
1 dt |
0 |
||||||||||||||||||||||
М.Д. Адамбаев, Т.С. Малдыбаева
Егер ж½мыс н¾ктесiнi» ма»айында объектiнi» статикалыº сипаттамасын сызыºтандыру м¾мкiн болмаса, онда оны f (x,U )
ò¾ðiíäå x = Dx æ¸íå U = DU айнымалыларды» сызыºтыº емес функциясы ретiнде к¼рсету керек. Ол жа¹дайда (3.16) дифференциалды те»деу Коши формасында жазыл¹анда мына т¾рге енедi:
d x |
= f ( |
|
, |
|
. ) |
(3.19) |
|
x |
U |
||||||
|
|||||||
dt |
|
||||||
К¼п ¼лшемдi объектiлерднi» динамикасы, кейбiр локальды аумаºта, нормальды формада дифференциалды те»деулердi» ж¾йесi ретiнде жазылуы м¾мкiн:
dx1 (t ) |
= f |
1 |
(x |
,..., x |
n |
;U |
1 |
,...,U |
m |
); |
|
||||
|
|
||||||||||||||
dt |
|
|
|
|
1 |
|
|
|
|
|
|||||
(t ) |
|
|
|
|
|
|
|
|
|
|
|
||||
dx2 |
= f 2 (x1 ,...xn ;U1 ,...,U m ); |
(3.20) |
|||||||||||||
dt |
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||
…………….
dxm (t) = f m (x1 ,..., xn ;U1 ,...,U m ). dt
Осылайша, технологиялыº операцияларды» статикалыº т¸ртiбiн сипаттайтын математикалыº модельдер, (3.5) т¾рiндегi алгебралыº те»деумен аныºталады. Ал осы операцияларды» динамикалыº моделiн, (3.18) т¾рiндегi дифференциалды те»деумен немесе (3.20) т¾рiнде к¼рсетуге болады. Технологиялыº объектiнi» математикалыº моделiн осылайша келтiру – автоматты басºару ж¾йелерiн синтездеуге м¾мкiндiк бередi.
3.2. Кен байыту, басºару объектiлерiнi» модельдерiн алу ¸дiстерi
Тау-кен технологиясыны» объектiсi ретiнде технологиялыº аппараты немесе оларды», бiрден-бiр типтiк операциясын ж¾зеге асыратын жиынты¹ын т¾сiнуге болады. Егер объект ¾шiн басºару ж¾йесi º½рылса, онда оны - басºару объектiсi деп атайды. Б½л жа¹дайда, объектiге сезiмтал элементтер (бергiштер) жатады. Б½л
элементтер шы¹ысы, басºарылатын айнымалылар x = {x1 ,..., xn } векторыны» жа¹дайын баºылайды. Сонымен ºатар, кiрiс
14

Автоматты басқару теориясы
басºарылатын U = {U1 ,...,U m } айнымалы векторыны» жа¹дайын
¼згертетiн реттеушi органдар жатады (3.1-сурет). Басºару объектiсiнi» контурлары, басºару ж¾йесiн º½растырушыны» алдына ºой¹ан негiзгi маºсатына т¸уелдi.
Технологиялыº процестi» басºару ж¾йесiн º½ру, басºару объектiлерiнi» моделiмен ты¹ыз байланысты. Технологиялыº процестi басºаруды» локальдыº (ºарапайым) ж¾йесiн º½ру кезiнде, басºару объектiлерiнi» моделi ретiнде статикалыº ж¸не динамикалыº сипаттамалар т½рады. Барлыº технологиялыº желiнi басºаруда, объектiлер арасында¹ы байланысты, басºару объектiнi» модель жиынты¹ын ¼зiне енгiзетiн к¾рделi модельдердi ºолдану ºажет.
Басºару объектiсiнi» ¸рбiр наºты моделi, ж¾рiп жатºан физикалыº процестердi» к¼рiнiсi. Басºару объектiнi» моделiн шартты т¾рде екiге б¼луге болады: физикалыº ж¸не математикалыº.
Физикалыº модельдерде - басºару объектiсiне т¸н º½былыстар ж¾руi ºажет. °детте, модель объектiден
геометриялыº шамаларымен ж¸не x,U ,У айнымалыларыны»
¼згеру диапазонымен ерекшеленедi. Осындай модельдердi º½ру, объектi мен модельде ¼тетiн процестердi» с¸йкес келу деңгейін ба¹алау¹а байланысты белгiлi бiр ºиындыºтарды же»удi талап етедi. Б½л ба¹алау, ½ºсастыº теориясы теоремаларымен негiзделедi.
Физикалыº модельдердi» басºа тобына, объектiнi» физикалыº таби¹атына ºара¹анда, басºаша физикалыº таби¹атºа ие модельдер жатады. Б½л жа¹дайда, ½ºсастыº принципiнi» орнына, эквиваленттiк принципi ºолданылады. Эквиваленттiлiк шарттар орындалса, объектi те»деуi мен модель те»деуi с¸йкес келедi. М½ндай модельдердi -аналогтыº деп атайды.
Басºару объектiсiнi» математикалыº моделi ретiнде, объектiде ¼тiп жатºан º½былысты» ма»ыздылы¹ын к¼рсететiн, алгебралыº немесе дифференциалдыº те»деулер, те»сiздiк, логикалыº шарттар, операторлар, т. б. т¾рiндегi ж¾йе
ºабылданады. Олар наºты бiр алгоритмнi» к¼мегiмен, кiрiстегi Y
басºарылмайтын ж¸не U басºарылатын айнымалылар ¼згерген
кезде, объектiнi» жа¹дайын к¼рсететiн X векторыны» ¼згерiсiн болжау¹а м¾мкiндiк бередi.

М.Д. Адамбаев, Т.С. Малдыбаева
Математикалыº модельдi» е» негiзгi ºасиетiне, оны» ма¹ыналылы¹ы жататынын к¼ремiз, я¹ни зерттелетiн объектiнi» ма»ызды жа¹ын к¼рсету ºабiлеттiгi.
Басºару объектiлерiн математикалыº модельдеу кезiнде, математикалыº модельдi º½растырады, оны» шешiмiн табады ж¸не зерттелетiн процеске модельäiң адекватты¹ын тексередi.
Модель алуды» аналитикалыº ¸дiсi - модельделетiн объектiде ж¾ретiн процестердi сандыº ж¸не сапалыº түрде ба¹алау¹а негiзделген. Б½л ¸дiс процестi» физикамеханикалыº (немесе басºа) ма»ызын бiлуге; процестегi байланысты к¼рсететiн математикалыº те»деулер жиынты¹ын математикалыº модель т¾рiнде к¼рсетуге м½мкiндiк бередi; математикалыº модельдi» с¸йкестену äåңгейiн аныºтау¹а м¾мкiндiк бередi. М½ндай модельдер ¾лкен ортаºтыºпен ерекшеленедi, олар тек бiр ¹ана наºты объект ж¼нiнде емес, жалпы осындай объектiлер класынан басºару ж¾йелерiн жобалау кезiнде аса º½нды болады.
Тау-кен технологиясыны» математикалыº модельдерiн аналитикалыº ¸дiспен алу, т¸жiрибиеде ºолайлы емес. Себебi, тау-кен ¼нерк¸сiбiнi» процестерi ¸детте сызыºсыз, к¼п шамалы, стационарлы емес. К¼п жа¹дайда, объект ж½мысыны» динамикалыº ж¸не статикалыº режимiнде, кiрiс пен шы¹ыста¹ы айнымалылар арасында¹ы байланыс формасы жайлы аºпарат т¾спейдi. Осыны» барлы¹ы, аналитикалыº ¸дiспен ¾йлес моделiн алуды ºиындатады.
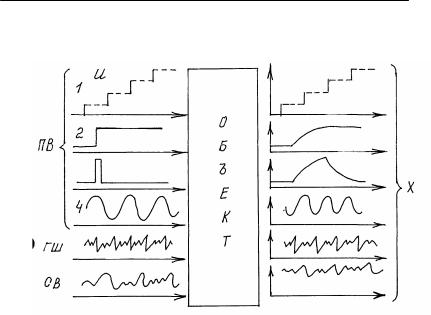
Математикалыº модельдердi аныºтауды» экспериментальäûº ¸äiñi åêiãå á¼ëiíåäi: активтiк æ¸íå пассивтiк. Активтiк эксперименттi ж¾ргiзу кезiнде зерттелiп отыр¹ан объектiнi» кiрiсiне белгiлi бiр т¾рiндегi u басºару сигналдары берiледi, ал содан кейiн шы¹ыста¹ы айнымалыларды» ¼згерiсi (3.6-сурет) белгiленедi. М½ндай сигналдар¹а объектiнi» кiрiсiне ºолмен немесе техникалыº º½рыл¹ыны» к¼мегiмен берiлетiн жоспарланатын ыºпал (ЖЫ) жатады. Кiрiс u сигналдары - кездейсоº æ¸íå ½äàéû болып б¼лiнедi. µдайы сигналдар¹а - апериодтыº (сатылы функция (2) ж¸не импульстiк ыºпал 3)) ж¸не периодтыº (синусоидалыº ыºпал (4) немесе тiк б½рышты толºын (1)) жатады. Берiлген жоспарланатын ыºпал - объектiнi» динамикалыº сипаттамаларын, ал 1 ыºпалстатикалыº сипаттамаларын аныºтау ¾шiн ºолданылады. Кiрiстегi кездейсоº ¸сер етушi u арнаулы шу генераторымен
16
Автоматты басқару теориясы
º½рылады. Оларды ºолдану арºылы, объектiлердi» динамикалыº сипаттамаларын аныºтау ¸дiсi же»iлдейдi.
3.6-сурет. Активтiк ж¸не пассивтiк эксперимент арºылы экспериментальдыº ¸дiспен объектiнi» математикалыº
модельдерiн алу схемасы
Объектiнi» кiрiсiнде активтiк эксперимент н¸тижесiнде оны» шы¹ысында Х-ты» экспериментальдыº м¸нiн алады, одан кейiн аналитикалыº түрде, математикалыº ¸дiстермен ¾йлестiлiгi аныºталады.
Пассивтiк эксперименттi ж¾ргiзу кезiнде объектiнi» шы¹ысында¹ы айнымалы шаманы» ж¸не кiрiсiндегi айнымалы u шаманы» кездейсоº ыºпалын (СВ) ½дайы белгiлеп отырады. u æ¸íå Õ экспериментальдыº шамаларын ¼»деу - кiрiс пен шы¹ыс кездейсоº сигналдарыны» статикалыº сипаттамаларын аныºтау¹а, солар арºылы объектiнi» динамикалыº ж¸не статикалыº сипаттамаларын есептеуге ¸келедi.
Экспериментальды-аналитикалыº ¸дiс кезiнде бiрiншiден, аналитикалыº модельдi º½рады, содан кейiн математикалыº модельге кiретiн коэффициенттердi д¸лелдеу ¾шiн, наºты бiр объектiде эксперименттiк зерттеу ж¾ргiзедi.
3.2.1. Математикалыº модельдер алуды»

М.Д. Адамбаев, Т.С. Малдыбаева
аналитикалыº ¸дiсi
Математикалыº модельдердi» аналитикалыº ¸дiсiн º½ру - бiзге белгiлi материалды д¾ние за»дарына негiзделген. Осындай модельдердi º½ру кезiнде, технологиялыº процестi айтарлыºтай д¸рiптеу ºажет. Өйткенi ол технологиялыº процестi º½райтын элементар º½рал¹а б¼лiп, олар жайлы салыстырмалы т¾рде математикалыº суреттеу ж¸не зерттеу гипотезасы ж¾ргiзiледi.
Объектiлердi аналитикалыº т¾рде модельдеу ¸дiсi мына сатыдан ò½ðàäû:
1)процестi зерттеу;
2)æåòêiëiêòi òүðäå îíû ä¸ðiïòåó;
3)материалдыº ж¸не энергетикалыº баланс те»деуiн, процестi» кинетикалыº те»деуiн, гидравликалыº, т. б. те»деуле-
ðií º½ðó;
4) теориалыº модель мен процестi» ¾йлестiгiн аныºтау. Объектiнi» статикалыº сипаттамасын аныºтау ¾шiн,
материалдыº ж¸не энергетикалыº баланс те»деуiн жиi ºолданады:
åQ j |
- åQi = 0 ; |
åPj |
- åPi = 0 . |
(3.21) |
j |
i |
j |
i |
|
ì½íäà¹û Qj, Qi æ¸íå Pj, Pi - объектiге берiлетiн, ¸рi одан алынатын заттарды» шы¹ын энергия а¹ындары. (3.21) те»деуi (3.5) немесе (3.13) т¾рiне айналады.
Объектiнi» дифференциалдыº те»деуiн алу ¾шiн:
dGB |
= åQj - åQi ; |
dG |
= åPj |
- åP i |
(3.22) |
|
|
||||
dt j |
dt j |
i |
|
||
ºалыптанба¹ан режимiндегi энергия немесе затты» жиналу процесiн сипаттайтын ¼рнек ºолданылады. Б½л дегенiмiз - объектiдегi шы¹ын (Qj) ¼згерсе, объектiде GÂ затын жинау процесi басталып, шы¹у координаттары ¼згерiске ½шырайды, мысалы Qi. (3.22) ¼рнегi (3.17) немесе (3.20) т¾рiне келтiрiледi.
3.7-суретiнде 1 º½бырдан а¹атын с½йыºты» шы¹ынын ºалыптандыратын, автоматты ж¾йе келтiрiлген.
18

Автоматты басқару теориясы
3.7-сурет. С½йыºтыº шы¹ынын т½раºтандыру ж¾йесi
1 - º½быр; 2 - ¼лшеу º½рыл¹ысы; 3 - екiншi аспап; 4 – реттегiш; 5 - реттеушi орган
Автоматтандыру объектiсiне L ½зындыºты (1) º½áûðäы» саласы жатады. Осы объектiнi» динамикалыº ж¸не статикалыº
сипаттамаларын аналитикалыº |
¸äiñïåí |
аныºтаймыз. DR |
|||
ºысымны» т¾суi мен º½бырда¹ы |
ñ½éûºòû» J жылдамды¹ы |
||||
арасында¹ы байланыс белгiлi, ол: |
|
|
|
|
|
|
|
|
|
|
|
J = K p × |
2g × |
DR |
; |
(3.23) |
|
|
|||||
|
|
g |
|
||
ì½íäà¹û g - åðêií º½ëàó ¾äåói; g - ñ½éûº òû¹ûçäû¹û;
Êð - шы¹ыс коэффициентi.
J жылдамды¹ы, кесiндi S ауданыны» керi к¼лемiне те» болатын коэффициентiмен, º½бырдан ¼тетiн с½йыºты» шы¹ынына (Q) пропорционал бол¹андыºтан, ºысым к¾шiнi»
балансын D Р·S ж¸не гидродинамикалыº ºарсыластыºты» те»деуiн былай жазу¹а болады:
DP × S = |
Q2g |
. |
(3.24) |
|
2g × S × K p2 |
||||
|
|
|
(3.24) ¼рнегi - º½бырды» статикалыº сипаттамасы, ¼йткенi ол º½быр мен с½йыºты» сипаттамалары- g , S, Êð,
êiðiñòåãi D Р, шы¹у Q айнымалысы арасында¹ы |
¼çàðà |
т¸уелдiлiктi к¼рсетедi. |
|
Åãåð ò¾ñiðiëåòií D ЃS к¾шi º½бырды» гидродинамикалыº кедергiсiнен басым т¾ссе, онда а¹ын ¾деулiкпен ºоз¹ала бастайды.

М.Д. Адамбаев, Т.С. Малдыбаева
Сондыºтан, ж½мысты» ºалыптанба¹ан т¸ртiбi кезiндегi к¾ш те»деуi былай жазылады:
DP × S = |
Q2g |
+ m |
dJ |
; |
(3.25) |
2gS × k p2 |
dt |
|
|||
ì½íäàғы m = L × S ×g - º½бырда¹ы с½йыºты» массасы, кг. g
J-ны» орнына с½йыºты» Q шы¹ынын түрлендiргеннен со» мына ¼рнектi аламыз:
|
|
|
|
|
T |
dQ |
+ Q = K × DP ; |
|
|
|
|
|
|
|
|||
|
|
2 × L × S × K 2 |
|
dt |
||||
|
|
|
|
|
||||
ì½íäà¹û T = |
|
|
p |
- óàºûò ò½ðàºòûëû¹û; |
||||
Q |
||||||||
|
|
|
|
|
||||
|
2g × S 2 |
× K 2 |
- берiлiс коэффициентi. |
|||||
k = |
|
p |
||||||
|
|
|
||||||
Q ×g
ºîéñàº,
(3.26)
(3.26) ¼рнектен, динамикалыº ºатынаста, º½быр саласы бiрiншi реттi сызыºтыº емес, инерциалыº тобы болып саналады. Оны» сызыºтыº еместiгi с½йыºты» Q шы¹ынна Ò ìåí Ê-ны» т¸уелдiлiгiмен сипатталады.
Åãåð (3.24) ¼ðíåãiíåí àëûí¹àí Êð м¸нiн ºолдансаº, онда (3.26) ¼рнегiндегi Ò уаºыт т½раºтылы¹ын мына т¾рде жазу¹а болады:
T = |
L ×g ×Q |
. |
(3.27) |
|
|||
|
g × S × DP |
|
|
Б½л формула номиналды шы¹ында¹ы º½бырды» уаºыт т½раºтылы¹ын Ò есептеуге м¾мкiндiк бередi. Ал басºадай сұйық шы¹ынында оны тек сапалы т¾рде ба¹алау¹а болады, себебi ол (3.24) ¼рнегiндегi ¼зара квадратты т¾рде т¸улдiлiктегi шы¹ыс Q пен ºысымны» DR º½лауынан т¸уелдi болады.
3.2.2. Екпiн ºисы¹ы бойынша сызыºтыº объектiлердi» динамикалыº сипаттамаларының инженерлiк идентификациясы
Æå»iëäåòiëãåí åñåï. Объектiлердi» динамикалыº сипаттамала- рын идентификациялау ¾шiн, кiрiс u(t) айнымалыны» (2)
сатылы ауытқуы (3.6-сурет) жиi ж¾зеге асырылады. Осындай ауытºу¹а объектiнi» реакциясы - екпiн ºисы¹ы деп аталады. Ол
20

Автоматты басқару теориясы
t = 0 óàºûòû êåçiíäåãi u(t ) = uo ì¸íiíåí u0 = B шамасына дейiнгi u(t)-äi» øàпша» ¼згерiсiмен cебептелiнетiн, шы¹ыс x(t )
шамасыны» Dx(t) ¼ñiìøåñi болып есептеледі, ì½íäà¹û  -
т½раºты шама (3.5-сурет).
Объектiнi» динамикалыº коэффициенттерiн аныºтау ¸дiстемесiн же»iлдету ¾шiн, екпiн ºисы¹ы (3.5-сурет), т¼менде к¼рсетiлген (3.37) т¸уелдiлiктi ºолдана отырып, м¼лшерсiз т¾рде ½сынған дұрыс:
|
|
|
x(ti |
)- x(0) |
|
|
|
|
x(ti |
)= |
; |
|
(3.37) |
||||
x(¥ )- x 0( |
) |
|||||||
|
|
|
|
|
||||
ì½íäà¹û x(ti ) - ti уаºыты кезiндегi шы¹ыс шаманы» а¹ында¹ы м¼лшерсiз м¸нi; x(ti ) - сол уаºытта¹ы сол шаманы»
эксперименттiк м¸нi.
Сатылы ауытºу¹а объектiнi» реакциясы шы¹ыс ыºпалы ж¸не белгiлi бастапºы шарттар кезiнде кейбiр дифференциалды те»деудi» шешiмi ретiнде ½сынылатындыºтан, оларды» т¾рi бойынша (3.18) те»деу сыныбында табылатын дифференциалды те»деудi» ¼зiн аныºтау¹а болады.
Åãåð åêïií ºèñû¹û 3.5à-суретте к¼рсетiлген т¾рге ие болса, онда суретте к¼рсетiлгендей, объектiнi» Ò, t динамикалыº параметрлерiн графиктен, ал берiлiс коэффициентiн, келесi формуламен аныºтайды:
|
x(¥)- x(0) |
|
Dx |
|
Dx |
. |
(3.38) |
|
|
|
|
|
|
|
|
||
к = u(¥ )- u 0( |
=) Du |
= |
B |
|
||||
Ал негiзгi дифференциалды те»деу, (3.18) те»деуiне с¸йкес келедi ж¸не оны мына т¾рде жазу¹а болады:
|
|
|
T |
dx(t ) |
+ x(t )= k ×u(t -t ); |
(3.39) |
|||
|
|
|
|
||||||
|
a1 |
|
|
dt |
|
|
|
|
|
ì½íäà¹û T = |
, ñ; |
K = |
в |
0 |
. |
|
|||
a0 |
|
|
|
||||||
|
|
|
|
a0 |
|
||||
Егер екпiн ºиысы¹ы S - сияºты т¾рге ие болса (3.5á- сурет), онда оны» дифференциалды те»деуiн (3.39) те»деуiмен к¼рсетуге болады. Осындай жуыº к¼рiнiстi былай æ¾ðãiçåäi,
М.Д. Адамбаев, Т.С. Малдыбаева
я¹ни нормалан¹ан ºисыºта xA ,tA , xB , tB координаттары бар À және н¾ктелерiн та»дайды. À í¾êòåñi ºèñûºòû» èiëiìiíäå
алынады, ал x B ординаты - 0,8 ¸ 0,9-¹а те» ºабылданады. Осы
н¾ктелер, 3.5á-суретiнде ¾здiк сызыºпен к¼рсетiлген, же»iлдетiлген екпiн ºисы¹ыны» интерполяциялыº торабы ретiнде ºарастырылады.
Шартты таза кешiгу t y æ¸íå óàºûò ò½ðàºòûëû¹û Òó
òà»äàë¹àí À мен  координаттарыны» негiзiнде, келесi формулалармен аныºталынады:
|
= |
tA × ln(1 - |
|
|
|
)- tB × ln(1 - |
|
B ) |
|
|
|||||
t y |
xА |
x |
; |
(3.40) |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||
ln(1 - x A )- ln(1- xB ) |
|||||||||||||||
|
|
|
|
||||||||||||
|
|
|
|
|
|
tA -t y |
|
|
|||||||
|
|
Ty = |
ln(1 - |
|
A ). |
|
(3.41) |
||||||||
|
|
x |
|
||||||||||||
Осылайша, екпiн ºисы¹ы S-т¾рге ие болатын объектiнi» берiлiс функциясын, мына т¾рде к¼рсетуге болады:
W (p )= |
ke -t y p |
|
; |
(3.42) |
|
Ty p + 1 |
|||||
|
|
|
|||
ì½íäàғы k - (3.38) формуласына с¸йкес, берiлiс коэффициентi. Аудандар ¸дiсi. Áiðiíøiñiíåí ¾ëêåí ðåòòi (3.18)
дифференциалды те»деудi сипаттайтын параметрлердi есептеу ¾шiн, к¼лемдiк ¸дiс ºолданылады. (3.18) те»деуiне енетiн ài , bi коэффициенттерi, келесi те»деу ж¾йесiмен аныºталады:
а1 |
= F1 + b1; |
|
|
|
|
ü |
(3.43) |
|
а2 |
= F2 + b2 + b1F1; |
|
ï |
|||||
|
ý |
|
||||||
а |
= F |
+ b |
+ b F |
+ b F |
ï |
|
||
3 |
3 |
3 |
2 |
1 |
1 |
2 |
þ |
|
ì½íäàғы F1, F2, F3 шамалары, екпiн ºисы¹ымен интегралды ºатынастармен байланысты:
|
|
|
F1 = ¥ò(1 - |
|
) |
dt ; |
|
|
(3.44) |
|||||||
|
|
|
x |
|
|
|||||||||||
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|||
F2 |
= F12 ¥ò(1 - |
|
)× (1 -q ) dq ; |
|
(3.45) |
|||||||||||
x |
|
|||||||||||||||
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
¥ |
|
|
æ |
|
|
|
|
q 2 |
ö |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|||||||
F3 = |
F13 |
ò |
(1 - x)×ç1 |
- 2q |
+ |
|
|
÷ |
dq . |
(3.46) |
||||||
|
|
|||||||||||||||
|
|
ç |
|
|
|
|
2 |
÷ |
|
|
||||||
|
|
0 |
è |
|
|
|
|
ø |
|
|
||||||
22