

5.1. Обозначения в структурных схемах линейных систем
В структурных схемах используют следующие обозначения:
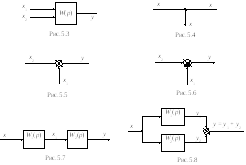
1. Линия передачи сигнала(рис.5.1).

 . Динамическое
звено с одним входом и выходом направленного
действия (рис.5.2).
. Динамическое
звено с одним входом и выходом направленного
действия (рис.5.2).
3. Динамическое звено с двумя входами (рис.5.3).
4. Узел или разветвление. В месте разветвления сигнал не делится (рис.5.4).
5. Сумматор y = x1 + x2(рис.5.5).
6. Устройство сравнения y = x2-x1(рис.5.6).
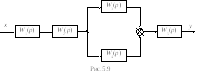
Рассмотрим основные виды соединения звеньев
1. Последовательное соединение(рис.5.7).
Имеем X1(p) = W1(p)X(p); Y(p) = W2(p)X1(p) = W1(p)W2(p)X(p) = = Wэкв(p)X(p), гдеWэкв(p) = W1(p)W2(p).
В общем случае
![]() ,
гдеWэкв(p) – эквивалентная
передаточная функция;N– число
последовательно включенных звеньев.
,
гдеWэкв(p) – эквивалентная
передаточная функция;N– число
последовательно включенных звеньев.
Таким образом, передаточная функция последовательно включенных звеньев равна произведению передаточных функций каждого звена.
2. Параллельное соединение(рис.5.8).
Имеем Y(p) = Y1(p) + Y2(p) = W1(p)X(p) + W2(p)X(p) = [W1(p) + + W2(p)]X(p) = Wэкв(p)X(p).
![]() ,
т.е. передаточная функция параллельно
соединенных звеньев равна сумме их
передаточных функций.
,
т.е. передаточная функция параллельно
соединенных звеньев равна сумме их
передаточных функций.
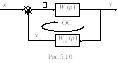
➢ Пример 6.Запишем эквивалентную передаточную функцию системы, структурная схема которой приведена нарис.5.9.
Wэкв(p) = W1(p)W2(p)[W3(p) + W4(p)]W5(p).
* * *
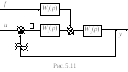
Найдем передаточнуюфункцию по каналуxy:Wxy(p).
Имеем
(p) = X(p) –Y1(p) = X(p) –WОС(p)Y(p). (5.1)
С другой стороны,
![]() .
(5.2)
.
(5.2)
Приравняв левые и правые части уравнений (5.1) и (5.2), окончательно получим
![]() .
.
5.2. Передаточная функция замкнутой асу
Пусть структурная схема системы имеет вид, показанный на рис.5.11. Воспользовавшись приведенными ранее правилами, для данной структурной схемы можно записать:
1. Передаточную функцию разомкнутой системы
Wp(p) = W1(p)W2(p).
2. Передаточную функцию по управлению
![]() .
.
3. Передаточную функцию по возмущению
![]() .
.
4. Передаточную функцию по ошибке
![]() .
.
Заметим, что в случае положительной обратной связи знаменатель имеет вид 1 – Wp(p) и входной сигнал усиливается.
5.3. Правила структурных преобразований
Если структурная схема оказывается сложной и содержит много перекрестных связей, можно попытаться упростить ее с помощью определенных правил. Основной принцип преобразования структурных схем заключается в том, что выходные величины исходной (части а рис.5.12-5.19) и эквивалентной (части б рис.5.12-5.19) схемдолжны быть равны. К наиболее распространенным правилам преобразования относятся следующие:
1. Перестановка сумматоров (рис.5.12).
2. Перестановка звеньев (рис.5.13).
3. Перестановка узлов (рис.5.14).
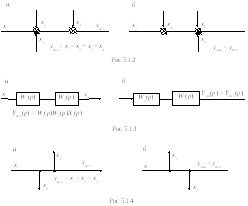
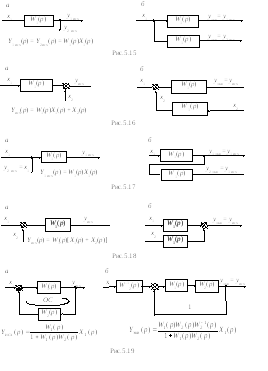
4. Перенос узлов и сумматоров с выхода на вход (рис.5.15, 5.16).
5. Перенос узлов и сумматоров с входа на выход (рис.5.17, 5.18).
6. Переход к единичной обратной связи (рис.5.19).
Пример 7.Пусть задана структурная схема, показанная нарис.5.20. НайдемWxy(p).
Применив правило перестановки сумматоров 1 и 2 и переноса узла Dс выхода на вход пятого звенаW5(p), а затем перестановки его с узломC, получим структурную схему без перекрестных связей (рис.5.21). Для преобразованной схемы можно записать:
![]() ;
;
![]() ;
;![]() .
.