

8.3. Принцип инвариантности
Инвариант(неизменяющийся – фр.) – выражение, остающееся неизменным при определенном преобразовании входящих в него переменных. В теории автоматического управления подинвариантнымипонимают системы, в которых выходная величина инвариантна к возмущающим воздействиям.
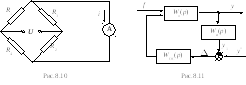
Примером инвариантной системы может
служить мостовая схема, применяемая в
системах измерения (рис.8.10).
Здесь при условии соблюдения баланса![]() ток в одной из диагоналейiне зависит от напряженияU,
подводимого к другой диагонали.
ток в одной из диагоналейiне зависит от напряженияU,
подводимого к другой диагонали.
Для достижения полной инвариантности некоторой координаты yj(t) относительно значения возмущающего воздействияfi(t) необходимо и достаточно, чтобы передаточная функцияWfy(p) между внешним воздействиемfi(t) и входом измерительного устройстваyj(t) была тождественно равна нулю при отсутствии прочих воздействий и нулевых начальных условиях. При ненулевых начальных условиях ставится цель сделать тождественно равной нулю вынужденную составляющую решения дифференциального уравнения, причем собственная (переходная) составляющая, обусловленная ненулевыми начальными условиями, может быть отличной от нулевого значения.
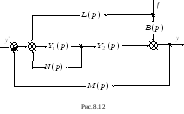
Рассмотрим схему системы управления
по отклонению (рис.8.11).
Известно, что![]() ,
где для данного случая
,
где для данного случая
![]() ,
,
где
![]() ,
,![]() ,
,![]() – передаточные функции объекта
управления, измерительного элемента и
обратной связи;y*,y,y1– заданное, текущее и измеренное значения
выходной величины;– отклонение измеренного значения
выходной величиныy1от заданногоy*;f– возмущающее
воздействие.
– передаточные функции объекта
управления, измерительного элемента и
обратной связи;y*,y,y1– заданное, текущее и измеренное значения
выходной величины;– отклонение измеренного значения
выходной величиныy1от заданногоy*;f– возмущающее
воздействие.
![]() и
и![]() заданы, достигнуть абсолютной
инвариантности можно только при
заданы, достигнуть абсолютной
инвариантности можно только при![]() ,
т.е. при очень большом коэффициенте
усиления в составе обратной связи,
который обратит
,
т.е. при очень большом коэффициенте
усиления в составе обратной связи,
который обратит![]() в ноль.
в ноль.
Передаточная функция по каналу управления y*может и не быть равной нулю:
![]() ;
;
при
![]()
![]() .
.
К такому результату и стремятся при создании абсолютно инвариантных систем, так как необходимо достичь инвариантности выходной координаты и не потерять возможность передавать информационные сигналы.
Для получения
![]() применяют внутреннюю положительную
обратную связь. При этом
применяют внутреннюю положительную
обратную связь. При этом
![]()
![]() ,
(8.16)
,
(8.16)
где W1(p),W2(p) – передаточные функции звеньев, являющихся составными частями обратной связи объекта, представленной в виде внутренней положительной обратной связи(звено с передаточной функциейW1(p) в составе обратной связи объекта охвачено положительной обратной связью с передаточной функциейW2(p)).
Условие инвариантности сводится к равенству нулю знаменателя (8.16):
![]() .
.
Заметим, что для выполнения условия инвариантности требуются устройства, выполняющие операцию идеального дифференцирования. Небольшая ошибка при этом может привести к появлению в дифференциальном уравнении отрицательных членов и, следовательно, неустойчивости. Такие системы, по определению академика Андронова, являются «негрубыми».
Таким образом, требования инвариантности и устойчивости противоречивы, и это противоречие появляется вследствие того, что, приближаясь к абсолютно инвариантной, система может стать «негрубой».
Рассмотрим вопрос о физической осуществимости абсолютно инвариантных систем. Условие реализуемости заключается в требовании обеспечения состояния абсолютной инвариантности как в замкнутом, так и в разомкнутом состояниях системы.
Действительно, для замкнутой системы имеем
![]() (8.17)
(8.17)
или
![]()
Для разомкнутой системы
![]() (8.18)
(8.18)
или
![]() .
.
В обоих случаях абсолютная инвариантность
достигается при
![]() .
.
Выражения (8.17) и (8.18) могут отличаться
только потому, что для выполнения условия
инвариантности необходимо иметь
![]() и
и![]() .
Первое условие всегда выполняется при
.
Первое условие всегда выполняется при![]() .
Следовательно, условие
.
Следовательно, условие![]() является необходимым для физически
осуществимой инвариантной системы.
Кроме того, необходимо, чтобы передаточная
функция корректирующего устройства
является необходимым для физически
осуществимой инвариантной системы.
Кроме того, необходимо, чтобы передаточная
функция корректирующего устройства

удовлетворяла условию
![]() .
(8.19)
.
(8.19)
Как уже отмечалось, для достижения
инвариантности
![]() относительно
относительно![]() необходимо и достаточно, чтобы
необходимо и достаточно, чтобы![]() .
Этого можно добиться и в системах,
работающих по возмущению, для чего
.
Этого можно добиться и в системах,
работающих по возмущению, для чего![]() нужно представить в виде разности двух
передаточных функций, одна из которых
является корректирующей:
нужно представить в виде разности двух
передаточных функций, одна из которых
является корректирующей:![]() .
.
Тогда критерий реализуемости абсолютно инвариантной системы можно интерпретировать следующим образом: необходимым (но недостаточным) признаком физической реализуемости и абсолютной инвариантности системы является наличие в схеме по меньшей мере двух каналов передачи возмущающего воздействия между начальным приложением возмущения и той точкой, относительно которой стремятся достичь инвариантности. Принцип двухканальности является основной идеей при выборе рациональной структуры абсолютно инвариантных систем, но не заменяет условий физической реализуемости, приведенных выше.
В комбинированных системах управления выполнение условий инвариантности требует также создания противодействия, равного по значению, но противоположного по знаку возмущающему воздействию.
➢ Пример 16.Пусть имеем двухконтурную систему стабилизации, изображенную нарис.8.12.
Для удовлетворения условий инвариантности
требуется, чтобы передаточная функция
![]() была равна по величине, но обратна по
знаку передаточным функциям звеньев
второго канала, по которому передается
возмущение:
была равна по величине, но обратна по
знаку передаточным функциям звеньев
второго канала, по которому передается
возмущение:
![]() или
или![]() .
.
При выполнении условия (8.19) компенсирующее
звено
![]() физически реализуемо.
физически реализуемо.
В отличие от систем стабилизации по отклонению, системы, основанные на комбинированном принципе управления, не имеют противоречия между условиями устойчивости и инвариантности.
![]() достигается в астатической системе
первого порядка. Действительно, для
замкнутой астатической системы при
достигается в астатической системе
первого порядка. Действительно, для
замкнутой астатической системы при![]() имеем
имеем
![]() .
.
Отсюда видно, что
![]() в установившемся режиме не зависит от
в установившемся режиме не зависит от![]() .
.
Аналогично можно показать, что астатическая система второго порядка отрабатывает без статической ошибки любые постоянные сигналы и любые линейные функции времени. Эти рассуждения можно распространить на астатические системы любого порядка.
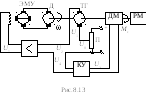
Электродвигатель в данном случае имеет
две степени свободы, так как его частота
вращения зависит от ЭДС в главной цепи
Еи от момента сопротивления![]() ,
т.е.
,
т.е.![]() .
Следовательно, для двигателя необходимо
записать два уравнения: уравнение
равновесия ЭДС в цепи якоря
.
Следовательно, для двигателя необходимо
записать два уравнения: уравнение
равновесия ЭДС в цепи якоря
![]() ;
(8.20)
;
(8.20)
и уравнение движения привода
![]() .
(8.21)
.
(8.21)
Исключив из (8.20) и (8.21) ток
![]() ,
получим
,
получим
![]() или
или![]() ,
,
где То– электромеханическая
постоянная,![]() .
.
Передаточная функция двигателя по
каналу
![]() будет иметь вид
будет иметь вид
![]() ,
,
а по каналу
![]()
![]() .
.
Передаточная функция ЭМУ с учетом
инерционности обмотки управления
![]() и поперечной цепи
и поперечной цепи![]() имеет вид
имеет вид
![]() .
.
Тахогенератор, усилитель и датчик
момента можно считать безынерционными
звеньями, тогда
![]()
![]()
![]() .
Структурная схема системы показана нарис.8.14.
.
Структурная схема системы показана нарис.8.14.
Для определения условий инвариантности запишем передаточную функцию по возмущению с учетом двухканальности в виде:
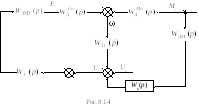
![]() ,
,
где
![]() .
.
Тогда
![]() .
.
Учитывая условие инвариантности
(равенство
нулю числителя![]() ),
имеем
),
имеем
![]() .
(8.22)
.
(8.22)
После подстановки в (8.22) значений соответствующих передаточных функций, имеем
![]()
или
![]() .
.
В данном случае
![]() ,
что противоречит условию физической
реализуемости (8.19). Таким образом,
абсолютно инвариантная система
нереализуема, однако, воспользовавшись
реальными дифференцирующими звеньями,
можно получить систему, достаточно
близкую к инвариантной. Заметим, что
даже при
,
что противоречит условию физической
реализуемости (8.19). Таким образом,
абсолютно инвариантная система
нереализуема, однако, воспользовавшись
реальными дифференцирующими звеньями,
можно получить систему, достаточно
близкую к инвариантной. Заметим, что
даже при![]() осуществляется полная инвариантность
системы по отношению к постоянному
моменту сопротивления, т.е. исключается
статическая ошибка.
осуществляется полная инвариантность
системы по отношению к постоянному
моменту сопротивления, т.е. исключается
статическая ошибка.
В данном случае условие инвариантности
системы не отразилось на ее устойчивости,
так как характеристическое уравнение
замкнутой системы
![]() не изменилось после введения корректирующего
звена. Следовательно, в комбинированных
системах условия инвариантности и
устойчивости не противоречат друг
другу.
не изменилось после введения корректирующего
звена. Следовательно, в комбинированных
системах условия инвариантности и
устойчивости не противоречат друг
другу.