

7.2. Косвенные методы
Эти методы обычно используют связь между параметрами системы и показателями качества. К ним относят корневые методы, интегральные оценки и частотные критерии качества.
1. Корневые методы.Уравнение переходного процесса в общем случае имеет вид
![]() ,
,
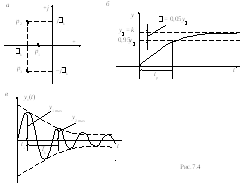
О характере переходного процесса можно судить по расположению корней на комплексной плоскости (рис.7.4, а).
Наиболее медленно затухают те составляющие y(t), которые имеют наибольшую постоянную времениTi,т.е. корень с наименьшей вещественной частью по абсолютной величине, напримерpmin = p1. Чем дальше от мнимой оси расположены корни характеристического уравнения, тем дальше от границы устойчивости находится система и тем выше быстродействие системы. Для оценки быстродействия используют понятиестепени устойчивостисистемы, под которым понимают расстояние от мнимой оси до ближайшего корня.
Величина pminможет служить для оценки скорости затухания переходного процесса, так как составляющая переходного процесса, обусловленная этим корнем, затухает медленнее других. Тогда можно записать:
![]() .
.
Всеми остальными составляющими переходного процесса можно пренебречь, так как они затухают быстрее.
Положив = 0,05y = 0,05k,
можно найтиtp(рис.7.4,б).
Имеем![]() или
или![]() .
Откуда
.
Откуда
![]() ,
,
где
![]() .
.
В общем случае
![]() .
.
Наличие комплексных сопряженных корней характеристического уравнения pk = –kjkсвидетельствует о существовании колебательной составляющей в уравнении движения системы (рис.7.4,в):
![]() .
.
Для оценки скорости затухания колебательного процесса используют логарифмический декремент(убавление– лат.)затуханияd:
 .
.
Введем обозначение
![]() ,
тогда
,
тогда![]() .
.
Таким образом, чем меньше , тем большеd, и, следовательно, тем скорее затухает переходный процесс. Приk = 0 получим = 0,d = , и, следовательно, колебания отсутствуют; приk = 0 имеем = ,d = 0, и, следовательно, колебания не затухают.
2. Интегральные оценки.Они имеют целью дать общую оценку скорости затухания и размера отклонения управляемой координаты без определения того или другого в отдельности.
Простейшей интегральной оценкой может служить площадь между новым значением выходной величины yи его текущим значениемy(t)

![]() .
(7.5)
.
(7.5)
При этом (t) = yy(t) является текущей динамической ошибкой системы (рис.7.5, а).
Для вычисления интеграла (7.5) можно
воспользоваться преобразованием Лапласа
для ошибки системы. Имеем
![]()
![]() ,
откуда
,
откуда
![]() .
(7.6)
.
(7.6)
В нашем случае при y*(t) = 1(t);![]() имеем
имеем
![]() .
.
Учтя, что Y(p) = W(p)Y*(p)
и![]() ,
получим
,
получим![]() ,
а затем, воспользовавшись (7.6), найдемI1.
,
а затем, воспользовавшись (7.6), найдемI1.
Недостаток интегральной оценки вида (7.5) состоит в том, что она годится только для монотонных процессов (рис.7.5, б). Если же имеют место колебания (рис.7.5,в), то алгебраическое сложение площадей может привести к ситуации, когда при больших колебанияхI1 = min.
В целях устранения этого недостатка на практике чаще всего применяют квадратичный интегральный критерий вида
![]() .
(7.7)
.
(7.7)
Этот критерий не зависит от знака (t) и, следовательно, может быть применен как для монотонных, так и для колебательных процессов.
Критерии I1иI2являются функциями параметров системы, изменяя которые можно минимизировать интегральные оценки.
Существуют методы, позволяющие вычислить
критерий I2, не решая ДУ системы.
В частности, учитывая, что(j)2 = (j)(–j)
и![]() ,
и взяв следующий табулированный интеграл,
получим
,
и взяв следующий табулированный интеграл,
получим
![]()
![]() .
.
Здесь
![]() .
.
Поскольку частотная функция системы
W(j) зависит
от параметров системы (коэффициентов
усиленияkiи постоянных
времениTjдинамических
звеньев), можно записать![]() .
Исследуя полученную зависимость на
экстремум, можно найти значения изменяемых
параметровki иTj,
при которых удовлетворяется условиеI2 = min.
.
Исследуя полученную зависимость на
экстремум, можно найти значения изменяемых
параметровki иTj,
при которых удовлетворяется условиеI2 = min.
Заметим, что минимизация интегральной квадратичной ошибки вида (7.7) приводит к большим перерегулированиям переходного процесса (до 20 % от установившегося значения y). В связи с этим применяют и иные критерии, учитывающие не только размер ошибки, но и скорость ее изменения
![]() ,
(7.8)
,
(7.8)
где – весовой коэффициент, который определяет значимость второго слагаемого подынтегральной функции.
В данном случае помимо ограничения на
размер ошибки (t)
налагается ограничение на скорость ее
изменения![]() .
В результате чего мы получаем достаточно
быстрые и достаточно плавные переходные
процессы.
.
В результате чего мы получаем достаточно
быстрые и достаточно плавные переходные
процессы.
Иногда кроме указанных ограничений учитывают также ограничение на ускорение. Тогда критерий принимает вид
![]() .
(7.9)
.
(7.9)
Подчеркнем, что все рассмотренные интегральные оценки являются функцией параметров системы, следовательно, их можно минимизировать, изменяя параметры системы и прежде всего устройства управления.
3. Частотные критерии качества.Эти критерии базируются на некоторых свойствах частотной функции и, в силу ее связи с временными характеристиками, позволяют судить о качестве переходного процесса.
![]() .
.
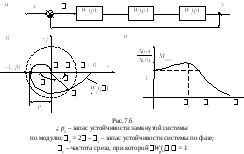
Годограф вектора Wp(j) для устойчивой системы представлен на рис.7.6,б. В хорошо демпфированных системах (при< 5 %)p1 = 0,10,5;13060о.
Оценка качества переходного процесса может быть также произведена по АЧХ замкнутой системы (рис.7.6, в).
Максимальное значение АЧХ – Mmax, соответствующее резонансной (собственной) частотеp, может служить показателем колебательности. Чем большеMmax, тем выше склонность системы к колебаниям. В хорошо демпфированных системахMmax1,11,5.
Частота, при которой A(c)/A(0) = 1, определяет частоту срезас,которая характеризует полосу пропускания частот. Чем шире полоса пропускания частот, т.е. чем большес, тем быстрее протекают переходные процессы, поэтому эта частота может служить мерой быстродействия системы.
Существуют и другие методы оценки
качества переходных процессов в системе
по ее частотным характеристикам.
Например, учитывая, что для минимально-фазовых
систем существует однозначная связь
между переходной функцией h(t) и
вещественной частотной характеристикойP(), можно,
анализируя последнюю, получить ряд
оценок качества переходного процесса.
В частности, еслиP()
представляет собой положительную
невозрастающую функцию, то перерегулированиене превышает 18 %,
если![]() отрицательная, убывающая по модулю,
непрерывная функция, то имеет место
монотонный переходный процесс.
отрицательная, убывающая по модулю,
непрерывная функция, то имеет место
монотонный переходный процесс.