

5.6. Многомерные системы управления
К многомернымотносятся АСУ, имеющие
несколько управляемых величинyj(![]() ).
Это имеет место во многих современных
сложных системах.
).
Это имеет место во многих современных
сложных системах.
![]() и возмущающих
и возмущающих![]() воздействий) и нескольких выходов,
определяемых управляемыми величинамиyj.Многомерный объект описывается системой
уравнений, которую удобно представлять
в матричной форме.
воздействий) и нескольких выходов,
определяемых управляемыми величинамиyj.Многомерный объект описывается системой
уравнений, которую удобно представлять
в матричной форме.
Введем: m-мерный вектор управляемых величин
![]() ;
(5.4)
;
(5.4)
k-мерный вектор управляющих величин
![]() ;
(5.5)
;
(5.5)
l-мерный вектор возмущений
![]() ,
(5.6)
,
(5.6)
где – операция транспонирования.
Если управляемые величины имеют разную физическую природу, то они должны входить в вектор-столбец со своими весовыми коэффициентами, уравнивающими их размерности. Аналогичным образом формируются векторы управления и возмущений.
Линеаризованные уравнения многомерного объекта могут быть представлены в матричном виде:
![]() ,
(5.7)
,
(5.7)
где
 ;
; ;
;
 – операторные матрицы.
– операторные матрицы.
Если в выражениях (5.4)-(5.7) перейти к изображениям Лапласа при нулевых начальных условиях, то (5.7) может быть представлено в виде
![]() .
(5.8)
.
(5.8)
Умножив левую и правую части уравнения
(5.8) на обратную матрицу
![]() ,
получим
,
получим
![]() ,
(5.9)
,
(5.9)
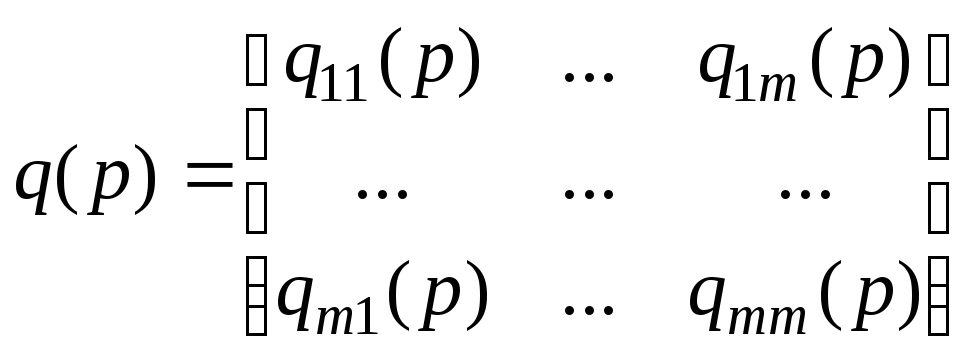
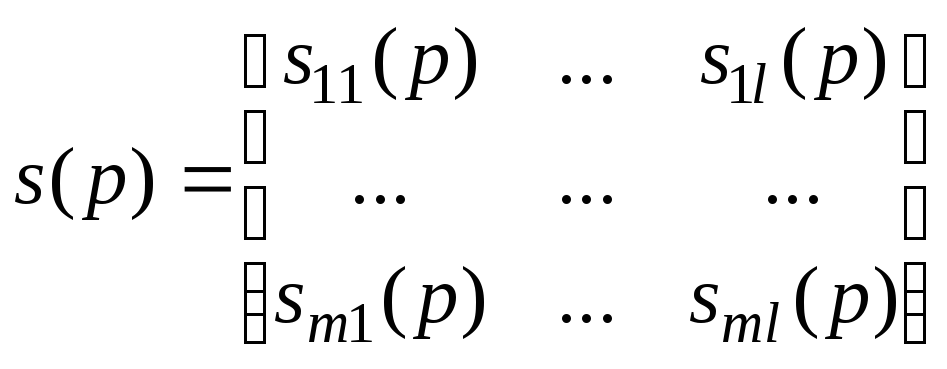
где
![]() – матрицы передаточных функций объекта
соответственно для управляющих и
возмущающих воздействий.
– матрицы передаточных функций объекта
соответственно для управляющих и
возмущающих воздействий.
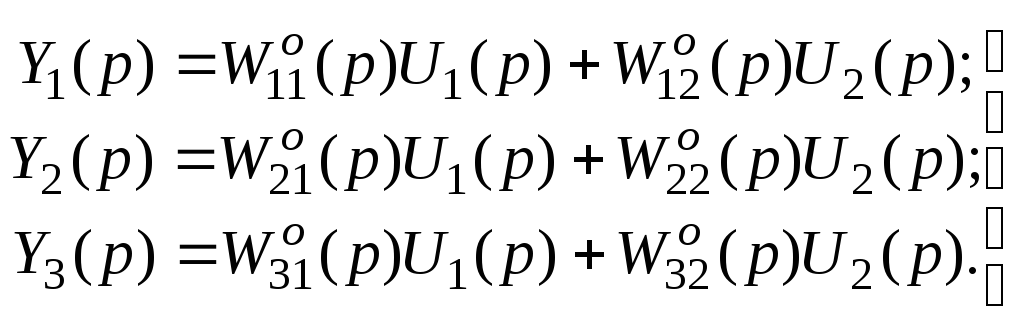
Выражение (5.9) позволяет установить связь между управляемыми величинами и возмущающими и управляющими воздействиями объекта. Так, при m = 3;k = 2 иl = 0 из (5.9) можно получить:
Если в матрице передаточных функций
![]() или
или![]() для каждого элемента матрицы (частной
передаточной функции) найти оригинал,
то будет получена так называемая матрица
Коши (матрица весовых функций). Например,
для управляющих воздействий
для каждого элемента матрицы (частной
передаточной функции) найти оригинал,
то будет получена так называемая матрица
Коши (матрица весовых функций). Например,
для управляющих воздействий
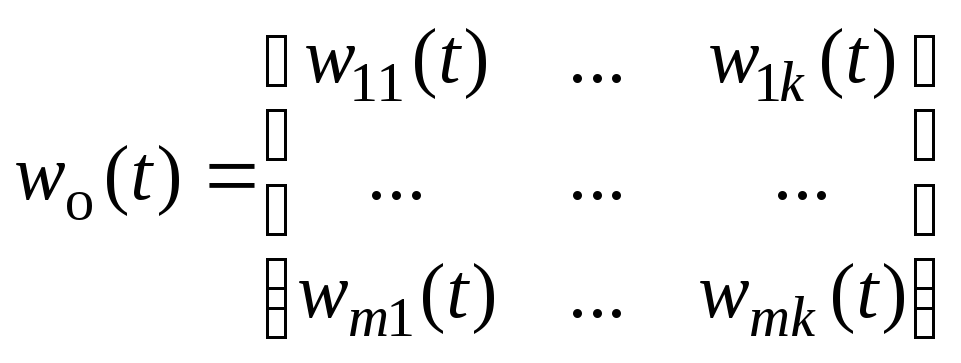 .
(5.10)
.
(5.10)
Если в нулевой момент времени на все
входы объекта поступают управляющие
воздействия
![]() ,
где
,
где![]() ,
то изменениеj-й
управляемой величины может быть
определено с помощью интеграла Дюамеля
на основании принципа суперпозиции:
,
то изменениеj-й
управляемой величины может быть
определено с помощью интеграла Дюамеля
на основании принципа суперпозиции:
![]() .
.
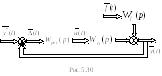
На рис.5.30изображена
структурная схема замкнутой многомерной
системы управления. На схеме все указанные
символы соответствуют матрицам:![]() – задающих воздействий;
– задающих воздействий;![]() – управляемых (выходных) величин объекта;
– управляемых (выходных) величин объекта;![]() – отклонений для каждой управляемой
величины;
– отклонений для каждой управляемой
величины;![]() – управляющих воздействий;
– управляющих воздействий;![]() – возмущений;
– возмущений;![]() – передаточных функций по управлениям;
– передаточных функций по управлениям;![]() – передаточных функций по возмущениям.
– передаточных функций по возмущениям.
![]() ,
которая определяет используемые законы
управления и показывает связь между
изображениями управляющих воздействий
и отклонений:
,
которая определяет используемые законы
управления и показывает связь между
изображениями управляющих воздействий
и отклонений:
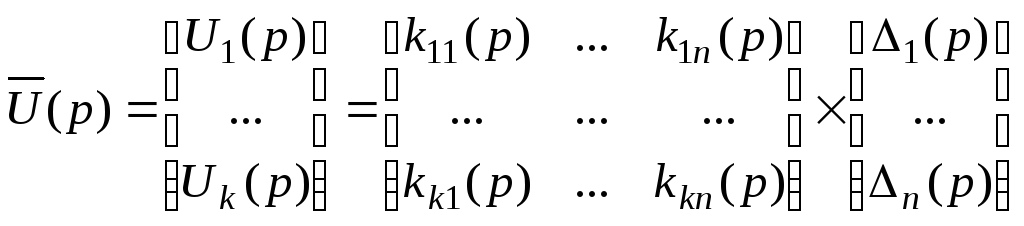 . (5.11)
. (5.11)
Матрица передаточных функций разомкнутой системы имеетвид
![]() .
.
Характеристическая
матрица системы имеет размерность![]() :
:
![]() ,
,
где I– единичная
матрица![]() ,
т.е. матрица, у которой все элементы
главной диагонали равны единице, а
остальные – нулю.
,
т.е. матрица, у которой все элементы
главной диагонали равны единице, а
остальные – нулю.
Характеристическое уравнение системы получается приравниванием к нулю определителя характеристической матрицы.
Отклонения
![]() (
(![]() )
представляют собой некоторые абстрактные
величины, знание которых полностью
определяет текущее состояние системы.
Их называютфазовыми координатамисистемы. Состояние системы может быть
также отождествлено с положением
изображающей точки вn-мерном
пространстве, которое называетсяпространством состояния, гдеnсоответствует числу управляемых величин.
)
представляют собой некоторые абстрактные
величины, знание которых полностью
определяет текущее состояние системы.
Их называютфазовыми координатамисистемы. Состояние системы может быть
также отождествлено с положением
изображающей точки вn-мерном
пространстве, которое называетсяпространством состояния, гдеnсоответствует числу управляемых величин.