

3. Методы решения линейных дифференциальных уравнений
3.1. Классический метод
Классическим оператором преобразования, связывающим входной и выходной сигналы линейной системы, является линейное ДУ с постоянными коэффициентами (рис.3.1).
Переменная, стоящая в правой части уравнения, является входным воздействием, а в левой – выходной величиной.
В общем случае линейное неоднородное ДУ записывается в виде
![]() .
(3.1)
.
(3.1)

![]() ,
,
где
![]() – общее решение однородного ДУ,
характеризует свободное движение
системы (без внешних воздействий);
– общее решение однородного ДУ,
характеризует свободное движение
системы (без внешних воздействий);![]() – частное решение неоднородного ДУ,
характеризует вынужденное движение
системы.
– частное решение неоднородного ДУ,
характеризует вынужденное движение
системы.
Общее решение однородного ДУ обычно отыскивается в виде экспоненты
![]() .
(3.2)
.
(3.2)
Взяв от (3.2) производные и подставив в (3.1), получим
![]() ,
,
или, сократив на e–pt, имеем
![]() .
(3.3)
.
(3.3)
Уравнение (3.3) является характеристическим уравнением ДУ (3.1), имеющим nкорней и, следовательно,nнезависимых решений. Известно, что если имеетсяnнезависимых решений уравнения, то их сумма также является решением этого уравнения, т.е.
![]() ,
,
где pi– корни характеристического уравнения;Ci– постоянные интегрирования, определяемые из начальных условий.
Частное решение неоднородного ДУ обычно отыскивается в том же виде, в каком дана правая часть, т.е. зависит от вида функции x(t) на входе.
В реальных системах входной сигнал чаще всего бывает случайной функцией времени. Поэтому, чтобы сопоставить переходные процессы в различных системах, рассматривают динамику систем при так называемых типовых входных воздействиях, в качестве которых чаще всего применяются единичные ступенчатая и импульсная функции.
Единичная ступенчатая функция(рис.3.2, а)
описывает мгновенное изменение входного
сигнала и обозначается![]() ,
,
Единичная импульсная функция(рис.3.2, б) описывается выражением
![]() .
.
Очевидно, что функции 1(t) и(t)
связаны между собой соотношением![]() .
При подаче на вход системы типового
входного воздействия вида
.
При подаче на вход системы типового
входного воздействия вида![]() или
или![]() выходная
величина системы будет изменяться во
времени тем или иным образом. Это
изменение и является реакцией системы
на определенное воздействие.
выходная
величина системы будет изменяться во
времени тем или иным образом. Это
изменение и является реакцией системы
на определенное воздействие.
Если
![]() и начальные условия нулевые, то реакция
системы называетсяпереходной функциейилипереходной характеристикой
и начальные условия нулевые, то реакция
системы называетсяпереходной функциейилипереходной характеристикой![]() .
.
Если
![]() и начальные условия нулевые, то реакция
системы называетсяимпульсной
переходной характеристикойилифункцией веса
и начальные условия нулевые, то реакция
системы называетсяимпульсной
переходной характеристикойилифункцией веса![]() .
.
Функции
![]() и
и![]() называютсявременными характеристикамисистемы иликривыми разгона, и для
линейных звеньев связаны соотношением
называютсявременными характеристикамисистемы иликривыми разгона, и для
линейных звеньев связаны соотношением
![]() .
.
➢ Пример 2. Пусть система управления описывается ДУ первого порядка
![]() ,
,
Найти временные характеристики системы.
Характеристическое уравнение
![]() имеет корень
имеет корень![]() .
Общее решение однородного ДУ имеет вид
.
Общее решение однородного ДУ имеет вид![]() .
Предположим, что
.
Предположим, что![]() ,
тогда частное решение ДУ
,
тогда частное решение ДУ![]() .
Подставив его в ДУ, получимC2 = k.
Тогда общее решение неоднородного ДУ
.
Подставив его в ДУ, получимC2 = k.
Тогда общее решение неоднородного ДУ![]() .
.
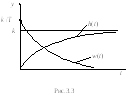
![]() и
и![]() (рис.3.3).
(рис.3.3).
➢ Пример 3. Если на вход системы (пример 2) подается линейно изменяющийся сигнал (рис.3.4, а), имеем
![]() ,
,
при этом
![]() ;
;![]() .
.
П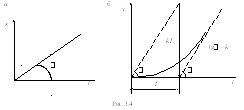 одставивy2(t) в ДУ, получимC2T + C2t + C3 = kt,
откуда, приравняв коэффициенты при
одинаковых степенях переменнойt,
имеемC2 = k,C2T + C3 = 0,
и, следовательно,C3 = –kT.
Тогда общее решение неоднородного ДУ
(рис.3.4, б)
одставивy2(t) в ДУ, получимC2T + C2t + C3 = kt,
откуда, приравняв коэффициенты при
одинаковых степенях переменнойt,
имеемC2 = k,C2T + C3 = 0,
и, следовательно,C3 = –kT.
Тогда общее решение неоднородного ДУ
(рис.3.4, б)
![]() .
.
При начальных условиях y(0) = 0 найдемC1 = Tk. Окончательно получим
![]() .
.