

5.4. Использование графов для преобразования структурных схем
Для наглядного изображения прохождения и преобразования сигнала в АСУ помимо структурных схем используют графы, которые, как и структурные схемы, представляют собой запись системы уравнений АСУ в виде рисунка.
Граф состоит из точек (узлов) и линий (ветвей), соединяющих эти точки. Узлам и ветвям могут быть сопоставлены некоторые величины и операторы. Если ветви графа имеют стрелки, соответствующие направлению распространения сигнала, то граф называется направленным. Рассмотрим его свойства.


2. Каждая ветвь (ребро) графа, изображенная в виде линии со стрелкой, имеет узел-начало x– входная величина и узел-конецy– выходная величина (рис.5.22, а). Выходная переменная ветви получается как результат преобразования входной величины, осуществляемый оператором передачи ветви:y = kx, гдеk– оператор (передача) графа.
3. Если из узла выходят несколько ветвей, то все они имеют одинаковую входную величину (рис.5.22, б).
4. Если к одному узлу подходит несколько ветвей, то переменная, соответствующая этому узлу, получается алгебраическим суммированием выходных переменных ветвей (рис.5.23).
Между структурной схемой и графом прохождения сигнала имеется прямое соответствие. Прямоугольник структурной схемы соответствует ветви, а линия передачи сигнала соответствует узлу.
➢ Пример 8.Пусть имеем две параллельно соединенные ветви. (рис.5.24, а) Тогда получимy = (k1 + k2)x = kэквx.
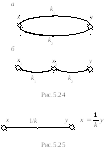
Пусть имеем две последовательно соединенные ветви (рис.5.24, б). Тогдаy = k1 k2x = kэквx.
* * *
В общем случае цепь из последовательно соединенных ветвей, идущих в одном направлении, может быть заменена одной ветвью, передача которой равна произведению передач последовательно соединенных ветвей (см. рис.5.22, а).
Заметим, что в случае ненаправленных звеньев можно производить инверсию графа (рис.5.25).
5.5. Формула Мезона
Эта формула позволяет отыскать любую переменную величину графа, если известны передачи всех ветвей. Пусть имеем граф, показанный на рис.5.26. Введем некоторые определения.
Узлы подразделяются на:
а) обычные узлы, имеющие как отходящие, так и подходящие ветви (x2);
б) источники, имеющие только отходящие ветви (x1);
в) стоки, имеющие только подходящие ветви (x6).
Любой узел можно превратить в сток с
помощью ветви с передачей 1
![]() .
Сигнал, который находится в источнике,
является независимой переменной (x1).
.
Сигнал, который находится в источнике,
является независимой переменной (x1).
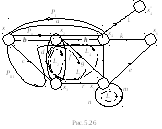
Например, между узлами x1иx4имеется три пути:
|
I |
II |
III |
|
x1 a x4 |
x1 bh x4 |
x1 cdh x4 |
Передачей путиPij– называется произведение передач ветвей, входящих в путь между узламиiиj. В нашем примере передача путейP14будет следующей:PI = a,PII = bh,PIII = cdh.
Контуромназывается замкнутая непересекающаяся последовательность ветвей, ориентированная в одном и том же направлении.
Передачей контураLi называется произведение передач ветвей, образующих контур. Для нашего примераL1 = m,L2 = fd,L3 = dgr,L4 = dhnr.
Передачей графаTij– называется отношение выходной величиныxjк входной величинеxi, причемxiесть источник, т.е. величина независимая,
![]() .
.
Для нашего случая при j = 4,i = 1 получимx4 = T14 x1.
Передача графа находится по формуле Мезона
 ,
(5.3)
,
(5.3)
здесь v– количество путей;u– количество контуров;– определитель графа;*– знак звездочки обозначает, что учитываются произведения только некасающихся (даже в точке) контуров, число которых равноu;Ps– передачаs-го пути, число путей равноv;s– алгебраическое дополнениеs-го пути, представляющее собой определитель графа, из которого исключены все контуры, которых касаетсяs-й путь; именно поэтому в числителе стоит знак*. Еслиs-й путь касается всех контуров, тоs = 1.
Для графа рис.5.26 определитель
= (1 –L1) (1 –L2) (1 –L3) (1 –L4) = 1 – (L1 + L2 + L3 + L4) +
+ (L1L2 + L1L3 + L1L4 ++ L2L3 + L2L4 + L3L4) –
– (L1L2L3 + L1L2L4 + L2L3L4 + L1L3L4) + L1L2L3L4.
Поскольку должны учитываться произведения только несоприкасающихся контуров, имеем* = [1 – (L1 + L2 + L3 + L4) + L1L2] (не касаются друг друга только контуры 1 и 2).
Алгебраические дополнения, полученные из определителя графа *: I = 1 – (L1 + L2 + L3) + L1L2 ; II = 1 – L1 ; III = 1 – L1.
Тогда в соответствии с (5.3) передача графа
![]() .
.
При рассмотрении АСУ передачи ветвей, входящих в передачи путей и передачи контуров, представляют собой передаточную функцию.
➢ Пример 9.Пусть имеем структурную схему, показанную на рис.5.27, а. Соответствующий граф имеет вид, показанный на рис.5.27,б. ЗдесьL1 = –W1W2;P1 = 1W1 = W1;1 = 1. Тогда
![]() .
.
➢ Пример 10.Пусть структурная схема системы имеет вид, показанный нарис.5.28, а.
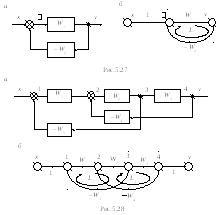
В соответствии с (5.3) L1 = –W1W2W5;L2 = –W2W3W4;P1 = = W1W2W3;* = (1 –L1)(1 –L2) = 1 – (L1 + L2) = 1 + W2(W1W5 + + W3W4);1 = 1. Тогда, воспользовавшись (5.3), получим
![]() .
.