

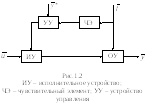
1.2. Принцип управления по возмущению
![]() на выходные величины объекта
на выходные величины объекта![]() осуществляется контроль этого возмущения,
и при его изменении управление
осуществляется контроль этого возмущения,
и при его изменении управление![]() меняют так, чтобы скомпенсировать
влияние возмущения. Функциональная
схема такой АСУ показана нарис.1.2.
меняют так, чтобы скомпенсировать
влияние возмущения. Функциональная
схема такой АСУ показана нарис.1.2.
Основной недостаток управления по
возмущению заключается в том, что данная
система является разомкнутой, т.е.
текущее значение величины
![]() не учитывается при управлении объектом.
Это означает, что характер управляющих
воздействий зависит от функционирования
объекта лишь в той степени, в какой
учтено влияние возмущения
не учитывается при управлении объектом.
Это означает, что характер управляющих
воздействий зависит от функционирования
объекта лишь в той степени, в какой
учтено влияние возмущения![]() и управления
и управления![]() на выходную величину
на выходную величину![]() .
В большинстве случаев полная информация
о таком влиянии отсутствует, в связи с
чем разомкнутая система не может
обеспечить желаемое поведение системы
с достаточной точностью. Достоинством
рассмотренных систем является
принципиальная возможность упреждающей
компенсации влияния возмущения
.
В большинстве случаев полная информация
о таком влиянии отсутствует, в связи с
чем разомкнутая система не может
обеспечить желаемое поведение системы
с достаточной точностью. Достоинством
рассмотренных систем является
принципиальная возможность упреждающей
компенсации влияния возмущения![]() на функционирование объекта за счет
соответствующего управления
на функционирование объекта за счет
соответствующего управления![]() .
В идеале выходная величина
.
В идеале выходная величина![]() не зависит от
не зависит от![]() (инвариантная система). В случае
необходимости изменения выходной
величины
(инвариантная система). В случае
необходимости изменения выходной
величины![]() в УУ подается дополнительный сигнал
в УУ подается дополнительный сигнал![]() *,
который называетсязадающим воздействием.
*,
который называетсязадающим воздействием.
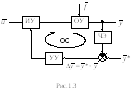
1.3. Принцип управления по отклонению
Основным признаком систем, работающих
по отклонению управляемой величины
![]() от заданного значения
от заданного значения![]() *
(принцип Ползунова – Уатта), является
наличие обратной связи (ОС), которая
обеспечивает зависимость управления
*
(принцип Ползунова – Уатта), является
наличие обратной связи (ОС), которая
обеспечивает зависимость управления![]() (входной величины) от управляемой
(выходной) величины
(входной величины) от управляемой
(выходной) величины![]() (рис.1.3).
(рис.1.3).
![]() может быть вызвано разными причинами,
в том числе и изменением задающего
воздействия
может быть вызвано разными причинами,
в том числе и изменением задающего
воздействия![]() *.
Его наличие является командой для
изменения управления
*.
Его наличие является командой для
изменения управления![]() до тех пор, пока
до тех пор, пока![]() не снизится до допустимого значения, в
частности до нуля. Таким образом, обратная
связь предполагает принципиальное
наличие ошибки, что является недостатком
такой системы. Кроме того, в системах с
обратной связью всегда имеет место
запаздывание информации о состоянии
объекта в силу его инерционности, что
ухудшает динамические показатели работы
системы, в частности, увеличивает
склонность системы к колебаниям. При
этом принцип обратной связи позволяет
успешно решать задачу управления,
несмотря на некоторую неопределенность
и неточность данных о характеристиках
объекта управления и возмущениях. Это
составляет основное преимущество этих
систем по сравнению с работающими по
возмущению.
не снизится до допустимого значения, в
частности до нуля. Таким образом, обратная
связь предполагает принципиальное
наличие ошибки, что является недостатком
такой системы. Кроме того, в системах с
обратной связью всегда имеет место
запаздывание информации о состоянии
объекта в силу его инерционности, что
ухудшает динамические показатели работы
системы, в частности, увеличивает
склонность системы к колебаниям. При
этом принцип обратной связи позволяет
успешно решать задачу управления,
несмотря на некоторую неопределенность
и неточность данных о характеристиках
объекта управления и возмущениях. Это
составляет основное преимущество этих
систем по сравнению с работающими по
возмущению.
Для улучшения динамических свойств систем применяют комбинированноеуправление: сочетание разомкнутых и замкнутых систем. В этом случае сильные возмущения в основном компенсируются по разомкнутому контуру, а все неучтенные возмущения и ошибки, возникающие из-за отсутствия полной информации о поведении объекта, – замкнутой системой.
1.4. Классификация асу
Система управления– это совокупность взаимосвязанных элементов или частей, объединенных общей целью функционирования. Под целью системы понимают определенное состояние ее выходных координат, которое может задаваться извне или вырабатываться самой системой. В первом случае система управления часто называетсясистемой регулирования. Если в результате функционирования системы достижение цели происходит без участия человека, то такая система управления называетсяавтоматической(АСУ).
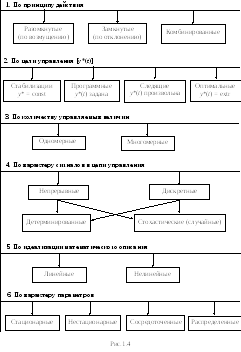
Можно классифицировать АСУ по самым различным признакам. В частности, по функциональным признакам АСУ можно разделить на два больших класса – адаптивные и неадаптивные. В последнем случае структура и параметры управляющего устройства в процессе функционирования АСУ остаются неизменными, неадаптивными,т.е. такими, какими они были получены при расчете и наладке системы. Основой создания таких систем служит предположение, что внешние и внутренние условия работы системы
изменяются в незначительных пределах, что не приводит к ее неудовлетворительному функционированию. Если диапазон изменения внешних и внутренних параметров системы настолько велик, что при помощи неадаптивной системы невозможно добиться удовлетворительного ее функционирования, необходимо применять систему управления с изменяющимися свойствами. Процесс изменения свойств системы, позволяющий ей достигнуть оптимального в определенном смысле или, по крайней мере, удовлетворительного функционирования в изменяющихся условиях, называется адаптацией(приспособлением). Системы, осуществляющие процесс адаптации, называютсяадаптивнымиилисамоприспосабливающимися.
Неадаптивные АСУ классифицируются по различным признакам, основные из которых приведены на рис.1.4.