

8.2. Коррекция линейных асу
Коррекция АСУ осуществляется введением в нее корректирующих звеньев для регулирования качества процессов управления, т.е. введение корректирующих звеньев в АСУ решает задачу синтеза системы с заданными свойствами.
Существует несколько видов коррекции.
1. Последовательная коррекция(рис.8.4). Пусть передаточная
функция скорректированной (желаемой)
системы задана и равнаWск(p).
Передаточная функция неизменяемой
части системы равнаWc(p).
В этом случае корректирующее звено
с передаточной функцией![]() включается последовательно с неизменной
частью системы и определяется
известнымиWc(p) иWск(p):
включается последовательно с неизменной
частью системы и определяется
известнымиWc(p) иWск(p):
|
откуда |
|
|
|
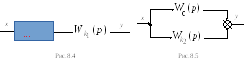 .Параллельная
коррекция(рис.8.5).
В этом случае корректирующее звено
включается параллельно с неизменной
частью системы. Тогда
.Параллельная
коррекция(рис.8.5).
В этом случае корректирующее звено
включается параллельно с неизменной
частью системы. Тогда
![]() ,
(8.8)
,
(8.8)
откуда
![]() .
.
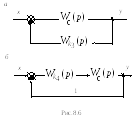
3. Коррекция с помощью обратной связи.В этом случае корректирующее звено может быть включено как в цепь обратной связи (рис.8.6, а), так и в главную (прямую) цепь (рис.8.6, б) последовательно с неизменной частью системы.
При включении в цепь обратной связи (встречно-параллельной коррекции) имеем
![]() ,
(8.9)
,
(8.9)
откуда
![]() .
.
При включении в прямую цепь при единичной обратной связи имеем
 ,
(8.10)
,
(8.10)
откуда
![]() .
.
Для получения формул перехода от корректирующих устройств одного типа к другому при одинаковых Wск(p) необходимо приравнять правые части соответствующих уравнений. Например, приравняем правые части уравнений (8.7) и (8.9):
 .
.
Полученное соотношение связывает передаточные функции корректирующих звеньев при последовательной и встречно-параллельной коррекциях.
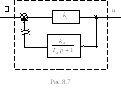
ПД-регулятор можно реализовать на базе П-регулятора с передаточной функцией WП(p) = = Wc(p) = kупри помощи охвата усилителя отрицательной обратной связью в виде апериодического звена первого порядка (рис.8.7).
![]() .
.
Если kу>> 1, то![]() и
и![]() ,
тогда
,
тогда
![]() ,
,
т.е. получили передаточную функцию ПД-регулятора.
В случае положительной обратной связи
![]()
![]()
 ,
,
т.е. получили передаточную функцию ПИ-регулятора.
* * *
Пусть объект управления представлен в виде последовательно включенных инерционных звеньев, выходные координаты которых могут быть измерены. Тогда каждым из этих звеньев можно управлять автономно, что дает ряд преимуществ: независимость настройки контуров и возможность достижения высокого быстродействия.
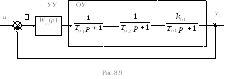
Рассмотрим многоконтурную систему с n контурами (рис.8.8). Поскольку во внутренние контуры управления заданиеuiподается из внешних контуров, все они являются последовательно подчиненными, за исключением последнего, который называется главным. В связи с этим рассматриваемые системы получили название –системы подчиненного управления(СПУ). Они были предложены Кесслером и являются разновидностью коррекции с помощью обратной связи с корректирующим звеном, включенным в прямую цепь.
В качестве критериев качества переходного процесса Кесслер предложил перерегулирование и время регулированияtp, которые желательно минимизировать. Поскольку эти критерии противоречивы, более корректной будет следующая формулировка цели управления: достижение максимального быстродействия, т.е.tp = min, при перерегулировании, не превышающем заданного значения (обычноз5 %). Синтез системы, реализующей поставленную цель, производится поконтурно, начиная с внутреннего контура.

В данном случае объект управления представлен тремя последовательно включенными звеньями, причем звенья, характеризуемые временем T1,T2, – малоинерционные по сравнению со звеном, характеризуемымTо1, т.е.
![]() .
.
Звенья с малыми постоянными времени можно заменить эквивалентным звеном:
![]()
 .
.
Тогда Wo1(p) примет вид
![]() .
(8.11)
.
(8.11)
Структура УУ, а следовательно, и вид передаточной функции Wy1(p) выбирается из следующих соображений:
2) для реализации цели управления (tp = min, т.е. достижения максимального быстродействия) желательно скомпенсировать большую постоянную времениTо1.
Исходя из сформулированных требований, Wу1(p) должно включать интегрирующее звено, а большая постоянная времени объектаTo1быть скомпенсирована. Запишем передаточную функцию ПИ-регулятора:
![]() .
.
Тогда передаточная функция разомкнутой системы
 ,
,
а передаточная функция замкнутой системы по каналу u1y1
![]() .
.
Обозначим
![]() (8.12)
(8.12)
тогда
![]() .
.
Таким образом, замкнутая система описывается линейным ДУ второго порядка, переходная функция h(t) которого зависит от величины коэффициента демпфирования.
Из соотношений (8.12) имеем
![]() .
(8.13)
.
(8.13)
Известно, что при
![]() перерегулирование = 4,3 < 5 %.
Следовательно, требования к качеству
переходного процесса в системе будут
удовлетворены. Подставив данное числовое
значенияв (8.13)
и учитывая, чтоTu = To1,
найдем значениеku:
перерегулирование = 4,3 < 5 %.
Следовательно, требования к качеству
переходного процесса в системе будут
удовлетворены. Подставив данное числовое
значенияв (8.13)
и учитывая, чтоTu = To1,
найдем значениеku:
![]() .
(8.14)
.
(8.14)
Выражение (8.14) дает оптимальное в смысле = задиtp = min значениеku, при этом
![]() .
.
Таким образом, параметры ПИ-регулятора следующие:
![]() ;
;![]() .
(8.15)
.
(8.15)
При этом статическая ошибка системы
![]() ,
,
где
![]() .
.
Аналогично рассчитывают остальные контуры, причем внутренние контуры принимают в качестве звена объекта управления.
* * *
Таким образом, при синтезе систем подчиненного управления нужно руководствоваться следующими правилами.
1. Каждому звену с большой постоянной времени объекта управления должно соответствовать звено с обратной передаточной функцией и такой же постоянной времени в составе управляющего устройства.
2. Значения коэффициентов пропорциональности при пропорциональной и интегральной частях должны быть выбраны в соответствии с соотношениями (8.15).
Заметим, что если в составе объекта управления имеется интегрирующее звено, то передаточная функция устройства управления для реализации поставленных целей должна содержать только пропорциональную часть, т.е. Wу1(p) = k1, гдеk1определяется выражением (8.15).