

4 Параметрический способ уравнивания
4.1. Параметрические уравнения
Пусть выполнено n измерений у1, у2, ..., уn с весами p1, p2, ..., pn; t - число необходимых измерений. Выбирают t независимых неизвестных - параметров - х1, х2, ..., хt. Это могут быть измеряемые и неизмеряемые (отметки, координаты определяемых пунктов) величины. Y1, Y2, ..., Yn - истинные значения измеренных величин; Х1, Х2, ..., Хt - истинные значения параметров. Между этими значениями может быть установлена исходная система параметрических уравнений связи, в которой измеренные величины представлены в виде функций выбранных параметров
Fi(X1, X2, ..., Xt) = Yi, (i = 1, 2, ..., n). (25)
С уравненными значениями измеренных величин и параметров система (25) принимает вид:
Fi(x1, x2, ..., xt) = yi + νi, (i = 1, 2, ..., n).
Или
Fi(x1, x2, ..., xt) - yi = νi, (i = 1, 2, ..., n). (26)
Функции Fi приводят к линейному виду разложением в ряд Тейлора. С этой целью вводят приближенные значения параметров х01, x02, ..., x0t, которые вычисляют по результатам измерений. Тогда
xj = x0j + δxj, (j = 1, 2, ..., t), (27)
где δхj - поправки к приближенным значениям параметров.
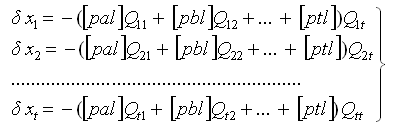
На основании (26) с учетом (27) будем иметь:

Обозначим
![]() -
свободные члены параметрических
уравнений поправок;
-
свободные члены параметрических
уравнений поправок;

- коэффициенты параметрических уравнений поправок;
![]() (28)
(28)
- параметрические уравнения поправок.
Систему (28) запишем в матричном виде:
АntXt1 + Ln1 = Vn1, (29)
где
 -
матрица коэффициентов;
-
матрица коэффициентов; -
вектор поправок к приближенным значениям
параметров;
-
вектор поправок к приближенным значениям
параметров;
 -
вектор свободных членов;
-
вектор свободных членов;  -
вектор поправок к результатам измерений.
-
вектор поправок к результатам измерений.
4.2. Нормальные уравнения
Параметрические
уравнения поправок ![]() решают
по СНК, т.е. под условием [pv²]
= min,
в результате чего получают систему
нормальных уравнений:
решают
по СНК, т.е. под условием [pv²]
= min,
в результате чего получают систему
нормальных уравнений:
NttXt1 + Bt1 = 0 (30)
Здесь
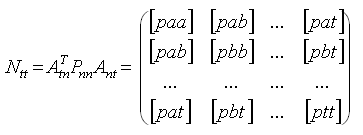
- матрица коэффициентов нормальных уравнений.
- вектор свободных членов.
Представим систему нормальных уравнений в обычном алгебраическом виде:
 (31)
(31)
4.3. Составление нормальных уравнений
Для составления нормальных уравнений коэффициенты и свободные члены параметрических уравнений поправок помещают в таблицу (табл. 8) по строкам. Пусть t = 2.
Таблица 8
Таблица параметрических уравнений
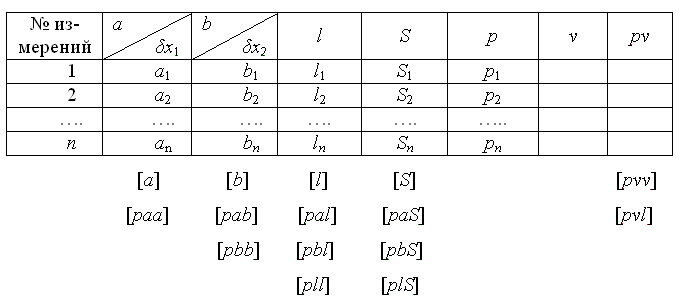
Si = ai + bi + li (32)
- контрольные суммы.
[S] = [a] + [b] + [l] - контроль Si.
Контроль составления нормальных уравнений:
[paS] = [paa] + [pab] + [pal];
[pbS] = [pab] + [pbb] + [pbl];
[plS] = [pal] + [pbl] + [pll].
4.4. Весовая функция
Для оценки точности уравненных элементов геодезической сети составляют весовую функцию. Это - функция параметров. Оцениваемую величину выражают через параметры. Функцию приводят к линейному виду разложением в ряд Тейлора.

Обозначим
F(x01, x02, ..., x0t) = f0 - приближенное значение функции, обычно не вычисляется;
 -
частные производные функции по параметрам;
-
частные производные функции по параметрам;
F = f0 + f1δx1 + f2δx2 + ... + ftδxt = f0 + FT1tXt1 (33)
- весовая функция в линейном виде;
![]() -
вектор коэффициентов функции.
-
вектор коэффициентов функции.
4.5. Решение нормальных уравнений способом обращения
Умножив систему нормальных уравнений NttXt1 + Bt1 = 0 на обратную матрицу N-1
получают:
![]() (34)
(34)
 (35)
(35)
- решение нормальных уравнений способом обращения.
По определению обратной матрицы, N-1N = E. Это равенство используется для обоснования способа определения элементов обратной матрицы. Пусть t = 2.

Отсюда следует:
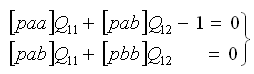 -
1-я система весовых нормальных уравнений.
-
1-я система весовых нормальных уравнений.
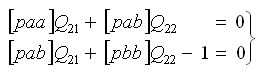 -
2-я система весовых нормальных уравнений.
-
2-я система весовых нормальных уравнений.
В общем случае в результате подобных действий получится t систем весовых нормальных уравнений по t уравнений в каждой системе. Эти системы имеют такую же матрицу коэффициентов, как и основная, с неизвестными δхj и отличаются от нее только столбцами свободных членов. В j-ом уравнении j-ой системы свободный член равен -1, остальные равны нулю. Системы весовых нормальных уравнений решают параллельно с основной системой, в общей схеме, с использованием дополнительных столбцов для свободных членов этих систем (табл. 9).
Таблица 9
Определение элементов обратной матрицы в схеме Гаусса
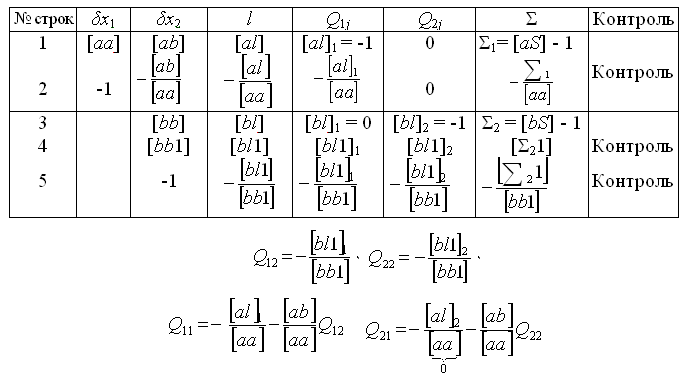
Для контроля вычисленные значения элементов обратной матрицы Qij подставляют в суммарные уравнения, составленные для весовых систем. Например, для t = 2 эти уравнения будут иметь вид:
([paa] + [раb])Q11 + ([pab] + [pbb])Q12 - 1 = 0;
([paa] + [pab])Q21 + ([pаb] + [pbb]) Q22 - 1 = 0.
Для предварительного контроля служат равенства Qij = Qji (i ≠ j).
Элементы обратной матрицы Qij называют весовыми коэффициентами.