

Определение реакций в низших парах с учетом сил трения
Действительная
реакция
![]() в поступательной паре (рис. 2.57) равна
геометрической сумме сил
в поступательной паре (рис. 2.57) равна
геометрической сумме сил
![]() и
и![]()
![]() =
=
![]() +
+
![]()
Она отклоняется
от нормальной составляющей
![]() на угол тренияρ.
Так как
на угол тренияρ.
Так как
![]() tg
ρ,
то f
= tg
ρ
и, соответственно, ρ = arctg
f.
tg
ρ,
то f
= tg
ρ
и, соответственно, ρ = arctg
f.
Скалярная её величина
R12
=
![]() =N12
=N12![]() .
.
Сила трения отклоняет действительную реакцию от нормали на угол трения ρ в сторону противоположную скорости V21.
Действительная реакция во вращательной паре с зазором также отклоняется на угол ρ, при этом создается момент трения (рис.2.58).
МТ = T12·r = R12·h,
где h = r·sin ρ





Р и с. 2.57.Действие сил в поступательной паре
Учитывая что ρ<10˚, то sin ρ ≈ tg ρ≈ ƒ, тогда h ≈ r·ƒ, a МТ = R12· r·ƒ.


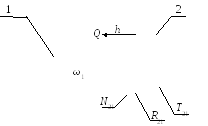
Р и с. 2.58. Действиесил во вращательной паре
Действительная точка касания цапфы с вкладышем при зазоре смещается на плечо h, зависящее от радиуса цапфы и коэффициента трения и направлена касательно кругу трения, радиусом h в противоположную сторону относительно угловой скорости ω.
Трение в высших парах
Сопротивление при качении определяется тем, что поверхностный слой упруго и пластически деформируется (рис. 2.59). Полоску контакта делят на участок сцепления и упругого скольжения.
MT = КN,
где MT – момент сопротивления;
N – нормальное давление;
К – коэффициент трения;
b – зона контакта.
Коэффициент K зависит от материалов, термообработки и т.д. Чем больше твердость материалов пары, тем меньше коэффициент сопротивления качению.

Р и с. 2.59.Трение качения
Условие чистого качения:
Сила тяги равна P = КN/r, так как ΣМА = 0 (Pr = КN).
F0 сила трения покоя при F0= ƒ0 N.
При чистом качении необходимо, чтобы сила тяги была меньше силы трения покоя P ≤ ƒ0·N. Соответственно ƒ0 >К/r, т.е. осуществить чистое качение можно только при достаточном трении скольжения.
Примеры расчета трения в кинематических парах:
1. Перемещение груза на катках (рис. 2.60).

Р и с. 2.60.Трение груза на катках:
Q – вес плиты; G – вес одного катка
При симметричном нагружении в верхних точках катков общий момент сопротивления
Мс1 = Q·К1.
В нижних
Мс2 = (Q + n·G)·К2,
где n – число катков;
К1, К2 – коэффициент сопротивления при качении.
Движущая сила Р находится из уравнения моментов, составленного относительно полюса мгновенного вращения, т.е. точки касания катков с опорой
P·2r = Q·К1 + (Q + n·G)·К2.
Пренебрегая весом катков G ≈ 0 имеем:
P = Q[(К1 + К2)/(2r)].
Если принять, что Р = F = ƒ*·Q, то приведенный коэффициент трения
ƒ* = (К1 +К2)/(2r).
Перемещение груза на катках производят на небольшие расстояния, а при перемещении груза на большие расстояния применяют тележки с колесами.
2. Передвижение груза на направляющих роликах, вращающихся в подшипниках (рис. 2.61).
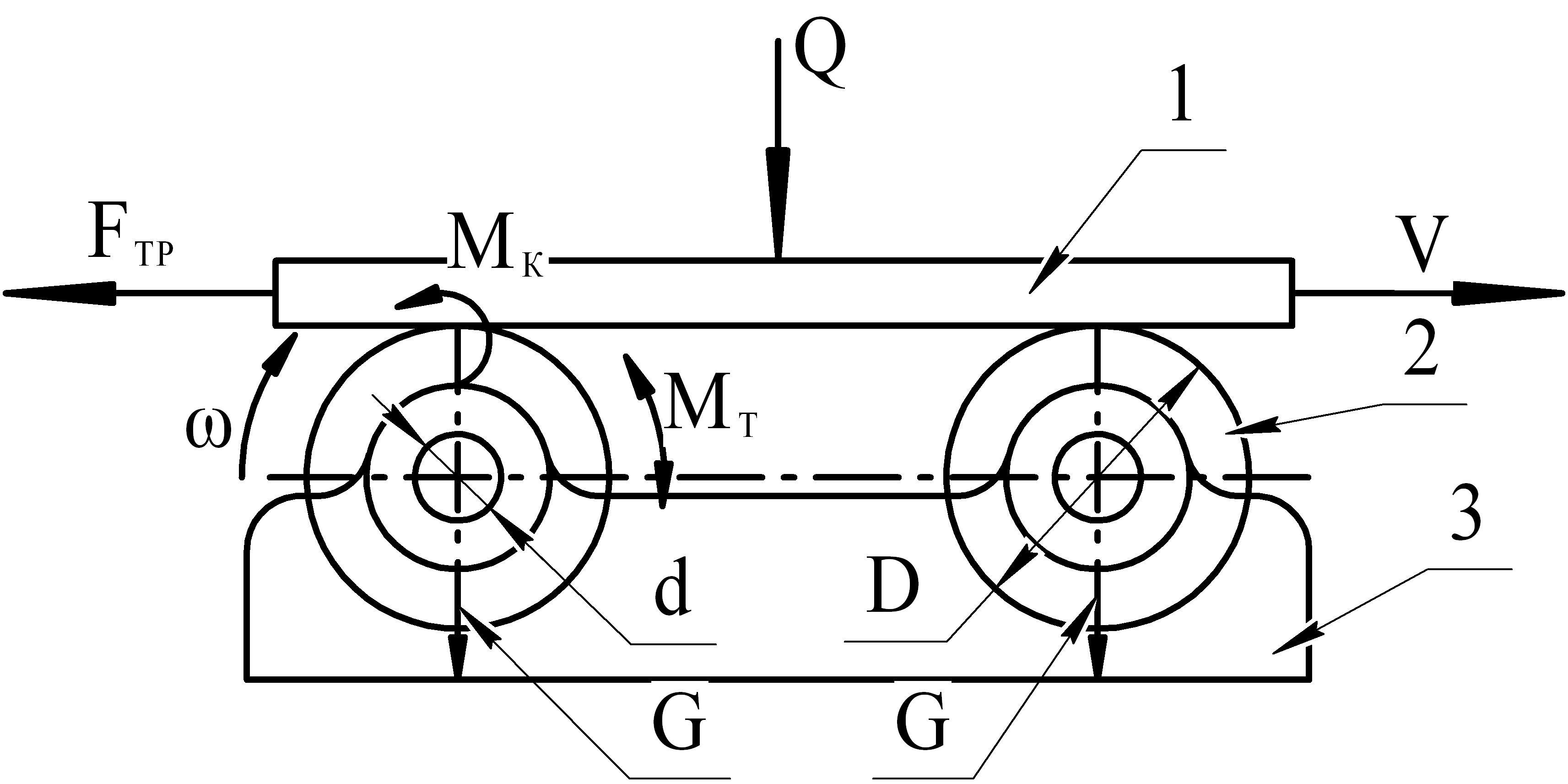
Р и с. 2.61. Трение груза на тележке
Общий момент сопротивления равен
М = МК + МТ. (2.94)
Момент сопротивления равен качению в паре 1-2
MК= Q·К. (2.95)
В паре 2-3 трения скольжения
МТ
= (Q
+ n·G)
ƒ*·![]() , (2.96)
, (2.96)
где d – диаметр цапфы;
n –число роликов.
Полагая, что G ≈0 из (2.95) имеем М = Q ( К+f*·d/2).
Положим, что М
= Q·![]()
![]() ,
то приведенный коэффициент трения
,
то приведенный коэффициент трения
равен![]() = ƒ*+К
/
= ƒ*+К
/![]() .
Момент
сил, приводящих во вращение катки равен
.
Момент
сил, приводящих во вращение катки равен
MТ12 Т = Q·ƒ12·D/2,
где D – диаметр роликов.
Осуществление чистого качения возможно при MТ12>M, следовательно, ƒ12·Q·D/2 > ƒ0·Q· d/2
ƒ12>![]() ·d/D.
·d/D.
Необходимая
движущая сила P
= 2M/D
= Q·ƒ
*0·d/D,
т.е. для ее снижения нужно увеличить D
и уменьшить d,
уменьшить
![]() за счет смазки и уменьшить К при увеличении
твердости.
за счет смазки и уменьшить К при увеличении
твердости.
3. Трение гибкой нити (рис. 2.62).
Трение гибкой нити встречается в ленточных тормозных устройствах и фрикционных передачах.
Теорию расчета гибкой нити по твердому телу (барабану) разработал в 1765 году Леонард Эйлер.
Σx = 0 = -ƒdN - S·cos(dα/2) + (S + dS)·cos(dα/2) = 0
Σy = 0 = -S·sin(dα/2) + dN - (S + dS)· sin(dα/2),
где ƒ – коэффициент трения;
dα – бесконечно малый угол обхвата.
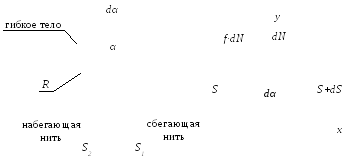

Р и с. 2.62.Трение гибкой нити
Принимая sin(dα/2) = dα/2; cos(dα/2) ≈ 1 и пренебрегаем dS(dα/2) = 0 получим
-ƒdN – S + S + dS = 0 => ƒdN = dS;
dN - S·dα/2 - S·dα/2 = 0 => dN = S·dα;
ƒdα = dS/S => ƒ·S·dα = dS;
![]()
![]() =
=![]() => ƒα = ln(S1/S2)
=> eƒα
= S1/S2;
=> ƒα = ln(S1/S2)
=> eƒα
= S1/S2;
S1 = S2 eƒα.
Сила трения о барабан T = S1-S2.
Вращающий момент ременной передачи
M
= S2·R·(
eƒα
– 1 )=S1R(1-![]() )
.
)
.