

Контрольные вопросы
Когда наблюдается статическая неуравновешенность ротора?
Когда наблюдается моментная неуравновешенность ротора?
Когда наблюдается динамическая неуравновешенность ротора?
Какими способами устраняются статическая, моментная и динамическая неуравновешенности?
Полностью материал по данной теме изложен в учебниках [1, с. 189-205], [2, с. 145-167], [4, с. 33-37].
2.7. Лекция № 7. Общие методы синтеза механизмов
Проектирование любого механизма начинается с проектирования его схемы. Затем следует расчет на прочность, конструктивное оформление звеньев и кинематических пар. Выбор материала не влияет существенно на свойства механизма. Проектирование схемы механизма по заданным его свойствам называется синтезом.
Синтез механизмов производится в два этапа: 1. Выбор структурной схемы (на основе структурного синтеза и использования справочных данных по механизмам). 2. Определение постоянных параметров выбранной схемы механизма по заданным его свойствам.
Независимые между собой постоянные параметры схемы механизма называются параметрами синтеза. Входные параметры устанавливаются заданием на синтез. Выходные определяются в процессе синтеза. Примером является задание на курсовой проект.
Основное условие синтеза: получение заданной траектории, обеспечение минимального давления на стойку, получение заданного закона движения и т.д.
Дополнительные – все остальные условия: ограничение длин звеньев, габариты, минимальный вес, ограничение углов давления и т.д.
Основное условие синтеза обычно выражается в виде экстремума функции, которая определяет его выходные параметры. Целевая функция – это есть математическое выражение основного условия синтеза. Оптимальным считается поиск ее экстремума.
Дополнительные условия синтеза представляются в математической форме, обычно это неравенства, устанавливающие области существования параметров синтеза. Поэтому целевая функция вычисляется только для тех комбинаций параметров синтеза, которые удовлетворяют ограничениям, т.е. дополнительным условиям, например, теорема Грасгофа.
Оптимизация – это определение выходных параметров синтеза из условий экстремума целевой функции при выполнении принятых ограничений. При небольшом числе параметров синтеза оптимизация целевой функции производится поиском экстремума функции нескольких переменных. При большом числе параметров – путем перебора при использовании ЭВМ. Методы оптимизации: случайный поиск, направленный поиск, комбинированный поиск.
Случайный поиск (метод Монте-Карло). При одном и том же числе испытаний вероятность получения решения больше, чем при последовательном переборе и заданном шаге измерения отдельных параметров.
Порядок решения задачи:
1. Произвольно выбираются выходные параметры синтеза из набора случайных чисел. Проверяются ограничения.
2. Вычисляется целевая функция, которая вместе с параметрами идет в память ЭВМ.
3. Выбираются другие значения параметров и вычисляется новая целевая функция. Если она меньше предыдущей, то идет в память, а прежняя выбрасывается.
Этапы повторяются пока не получат целевую функцию равную допустимой или ее величина перестанет уменьшаться.
Направленный поиск. Существуют несколько вариантов направленного поиска. Рассмотрим простейший вариант поиска. Его последовательность такова:
Произвольно выбирается первая комбинация исходных параметров (а, в, с, …), проверяются ограничения и вычисляется целевая функция.
Изменяется один из параметров синтеза на Δа. Если целевая функция уменьшилась, то машина идет в этом направлении.
Последовательно ищется min от каждого параметра.
После изменения всех параметров, вновь дается приращение первому параметру и т.д.
Минимум целевой функции быстрее достигается в том случае, когда можно определить ее частные производные по параметрам (метод наискорейшего спуска и другие градиентные методы).
Локальный и
глобальный минимумы.
Наименьший минимум называется глобальным,
а остальные минимумы – локальные. На
рисунке (2.26) показан график изменения
целевой функции
![]() а
от одного параметра а.
а
от одного параметра а.

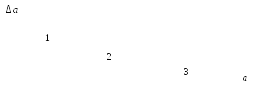
Р и с. 2.26.Зависимость целевой функции от параметраа:
В точке 3 находится глобальный минимум.
Минимумы 1, 2 – локальные
Комбинированный поиск. Направленный поиск обычно приводит лишь к локальному минимуму. Случайным поиском рассматриваются и сравниваются значения целевой функции в отдельных частях области изменения параметров а1,, а2, а3. Затем, направленным поиском находят локальный min, где ожидается глобальный.
Как видно, методы оптимизации являются общими. Недостатками методов оптимизации являются: трудоемкость поиска, невозможность оценки влияния отдельных параметров на качественные характеристики механизма.
Постановка задачи синтеза по Чебышеву. Заданная функция y=F(x) заменяется на y=Р(x) и именуется приближающей, которая содержит m параметров r1, r2, …, rm (рис. 2.27).


Р и с. 2.27.Приближение по Чебышеву
При этом отклонение
![]() приближающей
функции от заданной (разность координат)
является
приближающей
функции от заданной (разность координат)
является
![]() =
=
![]() (х,
r1,
r2,
…, rm).
(2.64)
(х,
r1,
r2,
…, rm).
(2.64)
Из системы уравнений,
составляемых на основании min![]() отклонения
(2.59). Согласно Чебышеву, задача приближенного
синтеза делится на 2 этапа:
отклонения
(2.59). Согласно Чебышеву, задача приближенного
синтеза делится на 2 этапа:
1. Выбор основного условия и дополнительных ограничений. Получение аналитического выражения функции.
2. Упрощение аналитического выражения основного условия синтеза от заданной функции.
Вычисление параметров синтеза из условия min∆ отклонения от заданной функции возможно следующими методами:
интерполирование;
квадратичное приближение функций;
наилучшее приближение функций.
Интерполирование. Функции F(x) и P(x) совпадают в точках-узлах интерполирования
Р(х1) = F(x1);
Р(х2) = F(x2); (2.65 )
Р(хn) = F(xn).
Система (2.65) линейна, если Р(х) имеет вид обобщенного полинома
P(x)=P0f0(x)+ P1f1(x)+…+ Pnfn(x), (2.66)
где P0, P1,…, Pn – коэффициенты;
f0, f1,…, fn – линейно независимые непрерывные функции аргументов, не содержащие неизвестные параметры.
Из полинома (2.66) можно получить обычные полиномы (степенные многочлены, тригонометрические полиномы…).
Недостаток: между узлами может быть большое отклонение от заданной функции.
Квадратическое приближение функций – обращение в min среднеквадратического отклонения от заданной функции
 ,
(2.67)
,
(2.67)
где xm, x0 – значения аргумента в конце и начале отрезка приближения. Среднеквадратическое отклонение становится min, если обращается в min интеграл
I
=
![]() .
(2.68)
.
(2.68)


Р и с. 2.28.Квадратическое приближение функции
Наилучшим приближением функций является функция, для которой максимальное отклонение от заданной функции имеет min возможную величину. Необходимо, чтобы число предельных отклонений было не меньше некоторого числа, зависящего от класса приближающей функции.


Р и с. 2.29.Наилучшее приближение функции
Метрический синтез механизма. При метрическом синтезе механизма производится определение основных размеров его звеньев по заданной функции S(φ) или β(φ), определяющей движение исполнительного звена или траектории одной из его точек. Если условно назовем метрические параметры звеньев А, кинематические функции S, качественные критерии К, то связь между ними описывается системой уравнений:
fi(A, S, K) = 0. (2.69)
При метрическом синтезе известны параметры S и К, а искомым является А. При анализе задано А, а искомыми являются S, и К. Разберем метрический синтез на примере передаточного механизма β(φ), т.е. предназначенного для воспроизведения заданной функциональной зависимости между перемещениями звеньев. Зависимости β(φ) могут быть реализованы с помощью ряда механизмов, схемы которых подобны (рис. 2.30)
![]() =
1;
=
1;
![]() = λ;
= λ;![]() =
μ;
=
μ;![]() =
η .
=
η .


Р и с. 2.30. Подобные механизмы
При метрическом синтезе четырехшарнирного механизма неизвестны 3 параметра, для шестизвенного механизма 5 параметров.
Метрический синтез рычажных механизмов
Решаются две задачи:
Задача об определении заданного закона движения исполнительного звена:
обеспечить условие существования кривошипа;
осуществить заданное перемещение S или β;
реализовать несколько положений входного и выходного звеньев;
иногда ограничить νmax или αmax;
обеспечить заданную передаточную функцию uпер = νвых /ω;
оптимизировать условие передачи сил;
улучшить эксплуатационный критерий.
Задача о приближении траектории одной из точек шатуна к определенной (окружность, прямая).
Рассмотрим примеры:
условие существования кривошипа (теорема Грасгофа):
Наименьшее звено является кривошипом, если сумма длин наименьшего и любого другого звена меньше суммы длин остальных двух звеньев.
Рассмотрим шарнирный четырехзвенник (рис. 2.30):
К ривошипАВ
=1. ВС=λ
CD=μ;
AD=η.
ривошипАВ
=1. ВС=λ
CD=μ;
AD=η.


а) μ < ( λ-1) + η; 1 + μ< λ+ η;

б) ∆ACD 1+ λ< μ + η;


в) ∆ВCD 1+ η < λ + μ;


г) 1+υ≤ λ
Р и с. 2.31.Определение длины кривошипа:
а, б, в – крайние положения четырехшарнирного механизма,
г – кривошипно-ползунного механизма
Складывая почленно а, б и в получим 1 < η; 1 < λ; 1 < μ, т.е. наименьшее звено является кривошипом.
При 1+ λ= μ+ η – двухкривошипный механизм. При несоблюдении теоремы Грасгофа – двухкоромысловый. В кривошипно-ползунном механизме условие существования кривошипа (рис. 2.31, г):
1+υ≤ λ;
оптимизация условия передачи сил при КПДmax, когда углы давления [
 ]
уменьшаются, как правило, [
]
уменьшаются, как правило, [ ]<300
на рабочем ходе и [
]<300
на рабочем ходе и [ ]
<450
на холостом
ходу.
]
<450
на холостом
ходу.
Например, для
кривошипно-ползунного механизма при
уменьшении λ, увеличивается [![]() ].
На практике принимают для двигателя
внутреннего сгорания λ равную от 2,5до
4; для компрессора от 4 до 5, для насосов
и прессов λ=5-8;
].
На практике принимают для двигателя
внутреннего сгорания λ равную от 2,5до
4; для компрессора от 4 до 5, для насосов
и прессов λ=5-8;
эксплуатационный критерий:σ = tp/tx = υx/ υp – коэффициент изменения средней скорости исполнительного звена; υ = tp/tц – коэффициент использования машинного времени.