

4.6. Индукционная дефектоскопия
Пассивные и
активные преобразователи.
По
закону Фарадеяво всяком замкнутом
проводящем контуре при изменении потока
магнитной индукции через площадь
через площадь ,
ограниченную этим контуром, возникает
э. д. с., равная
,
ограниченную этим контуром, возникает
э. д. с., равная
 ,
(2.78)
,
(2.78)
где
 -
число витков контура; знак " - "
указывает на то, что
-
число витков контура; знак " - "
указывает на то, что увеличивается при уменьшении и уменьшается
при возрастании
увеличивается при уменьшении и уменьшается
при возрастании (правило
Ленца).
(правило
Ленца).
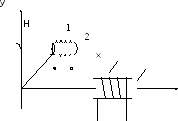
Рис. 2.23. Катушка (1) с сердечником (2) в магнитном поле
В общем случае
контур может иметь магнитный сердечник
с некоторой проницаемостью
 ,
а поле
,
а поле может быть направлено под некоторым
углом
может быть направлено под некоторым
углом к нормали контура (оси x на рис. 2.23). Тогда
магнитный поток равен
к нормали контура (оси x на рис. 2.23). Тогда
магнитный поток равен
 .
(2.79)
.
(2.79)
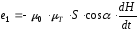
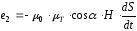
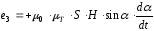
Существует 4 варианта возникновения э. д. с. в контуре:
 ,
(2.80)
,
(2.80)
 ,
(2.81)
,
(2.81)
 ,
(2.82)
,
(2.82)
 .
(2.83)
.
(2.83)
Во всех четырёх случаях контур является преобразователем магнитного поля в электрический сигнал, но только в трёх последних могут быть измерены как переменные, так и постоянные поля, а в первом - только переменные.
В случае (2.81) необходимо менять площадь катушки - это возможно за счёт приклеивания катушки к подложке, обладающей пьезо- или электрострикционными свойствами; в случае (2.82) катушка вращается в магнитном поле, такие преобразователи называют индукторами; наконец, в случае (2.83) необходимо менять проницаемость сердечника в катушке (феррозондовые преобразователи). В трех рассмотренных случаях к катушке надо подводить дополнительную энергию, поэтому такие преобразователи называются активными.
В случае (2.80) э. д. с. возникает только за счёт энергии измеряемого поля, поэтому такой преобразователь называется пассивным. В дефектоскопии часто приходится иметь дело с переменными полями (во времени или пространстве), поэтому пассивные преобразователи широко используются, имея важные преимущества в простоте изготовления и эксплуатации.
При
намагничивании изделия переменным
полем могут
быть измерены тангенциальная
 и нормальная
и нормальная компоненты поля дефекта или с помощью
комбинации двух катушек - его градиент.
Для контроля значительной площади
изделия необходимо ручное или
автоматическое сканирование. Важным
моментом является также и площадь
поперечного сечения катушки: при
компоненты поля дефекта или с помощью
комбинации двух катушек - его градиент.
Для контроля значительной площади
изделия необходимо ручное или
автоматическое сканирование. Важным
моментом является также и площадь
поперечного сечения катушки: при следует
следует .
Однако при большом по сравнению с
размерами дефектов увеличении
.
Однако при большом по сравнению с
размерами дефектов увеличении падает чувствительность к полям этих
дефектов вследствие их малой локализации.
падает чувствительность к полям этих
дефектов вследствие их малой локализации.
При намагничивании постоянным полем необходимо движение катушки относительно объекта контроля. Наиболее удобными объектами контроля являются три типа изделий: плоские длинные изделия с поперечными дефектами, когда достаточно осуществить только продольное перемещение катушки (или системы катушек); цилиндрические изделия с продольными дефектами, когда осуществляется вращение преобразователей по окружности изделия, и плоские изделия с продольными дефектами - в этом случае осуществляется вращение катушки в плоскости объекта (рис. 2.24).
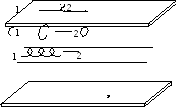
Рис. 2.24. Схемы индукционного контроля:
1 - объект контроля; 2 – дефект (движение катушки по стрелке).
Есть несколько
особенностей, которые следует учитывать
при организации такого контроля. Пусть
для определённости катушка движется
вдоль оси x.
Как следует из (2.80), при
 и
и
 ,
(2.84)
,
(2.84)
где
скорость
 .
Видно, что индукционная катушка реагирует
только на изменение поля, а не на его
абсолютную величину. Для дефектоскопии
этот факт является скорее положительным,
так как поле дефекта является локальным
и по (2.84) может быть выявлено на фоне
большого намагничивающего поля. Кроме
того, как следует из (2.84), для того, чтобы
иметь однозначную связь между градиентом
измеряемого поля (то есть поля дефекта)
и выходным сигналом, необходимо иметь
.
Видно, что индукционная катушка реагирует
только на изменение поля, а не на его
абсолютную величину. Для дефектоскопии
этот факт является скорее положительным,
так как поле дефекта является локальным
и по (2.84) может быть выявлено на фоне
большого намагничивающего поля. Кроме
того, как следует из (2.84), для того, чтобы
иметь однозначную связь между градиентом
измеряемого поля (то есть поля дефекта)
и выходным сигналом, необходимо иметь .
.
Одним из наиболее
удачных примеров применения указанного
метода является контроль уложенных
рельсов с помощью вагонов-дефектоскопов.
Поскольку скорость вагона-дефектоскопа
невозможно поддерживать постоянной на
всех участках пути, то возникают
трудности, показанные на рис. 2.25: сигналы
от одного и того же дефекта могут сильно
различаться в зависимости от
 .
.
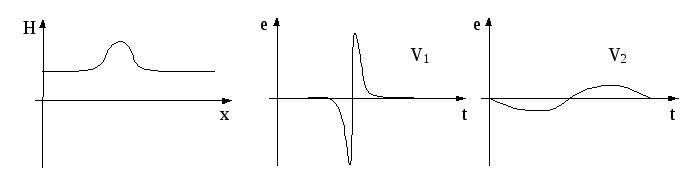
Рис.
2.25. Скорость
движения катушки
 >
>

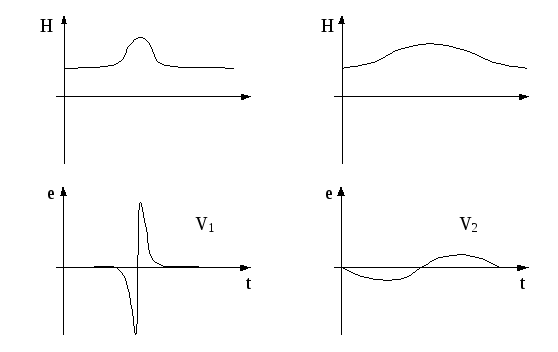
На рис. 2.26 показан
другой вывод, следующий из (2.84): два поля
равной амплитуды, но разной протяжённости
вдоль
 при
при
 дадут совершенно разный вклад в величину
дадут совершенно разный вклад в величину .
Мы уже отмечали этот факт как положительный:
можно считать поле на рис. 2.26а
полем трещины, а на рис. 2.26б
- полем лунки (если и дефекта, то не
опасного).
.
Мы уже отмечали этот факт как положительный:
можно считать поле на рис. 2.26а
полем трещины, а на рис. 2.26б
- полем лунки (если и дефекта, то не
опасного).
а б
Рис.
2.26. Зависимость сигнала
 от локальности поля
от локальности поля
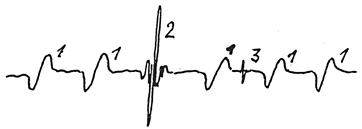
Рис. 2.27. Сигналы рельсового дефектоскопа:
1 - от подкладок; 2 – от стыкового соединения рельсов; 3 – от дефекта.
В рельсах, уложенных в пути, развиваются усталостные трещины (преимущественно в головке рельса), имеющие большую площадь в поперечном сечении рельса и очень малые размеры в направлении длины рельса. Для выявления таких дефектов целесообразно намагничивать рельс вдоль его длины и считывать поле рассеяния движущейся индукционной катушкой. Вагоны-дефектоскопы снабжены мощными электромагнитами, создающими постоянное магнитное поле, направленное вдоль рельса. Между полюсами электромагнитов располагается индукционная катушка. Если записать сигнал с катушки (например, на фотоплёнку), то запись схематически будет выглядеть, как показано на рис. 2.27.