

МУ ТМ_2015 / Сб. заданий по теоретич. механике Кинематика (Дрожжин, Баранова, Дадочкина и др)
.pdfНаправление VB найдем, учитывая, что точка В принадлежит одновременно ползуну, движущемуся вдоль направляющих поступательно. Те-
перь, зная направление VA и траекторию точки В, воспользуемся теоремой о
проекциях скоростей двух точек тела на прямую, соединяющую эти точки (прямая АВ). Сначала по этой теореме устанавливаем, в какую сторону на-
правлен вектор VB (проекции скоростей должны иметь одинаковые знаки).
Затем, вычисляя эти проекции, находим:
VB·cos30° = VA·cos60°, отсюда VB = 0,46 м/с.
3. Определяем VE . Точка Е принадлежит стержню DE. Следователь-
но, по аналогии с предыдущим, чтобы определить VE , надо сначала найти скорость точки D, принадлежащей одновременно стержню АВ. Для этого,
зная VA и VB , строим мгновенный центр скоростей (МЦС) стержня АВ. Это
точка Р3, лежащая на пересечении перпендикуляров к VA и VB , восстанов-
ленных из точек А и В (VA перпендикулярен стержню). По направлению век-
тора VA определяем направление поворота стержня АВ вокруг МЦС – Р3.
Вектор VD перпендикулярен отрезку Р3D, соединяющему точки D и Р3, и
направлен в сторону поворота стержня АВ. Величину VD найдем из пропорции:
VD |
|
VB |
. |
|
|
||
DP3 |
|
BP3 |
|
Чтобы вычислить Р3D и Р3B, заметим, что АР3В – прямоугольный, так как острые углы в нем равны 30° и 60°, и что Р3B = АВ·sin30° = 0,5 м, AD = BD. Тогда ВР3D является равносторонним и Р3B = Р3D. В результате определяем:
VD = VB = 0,46 м/с и VD P3 D .
Так как точка Е принадлежит одновременно стержню О2Е, вращаю-
|
|
|
|
|
|
|
|
|
|
|
|
|
|
щемуся вокруг О2, то VE |
|
O2 E . Тогда, восстановив из точек Е и D перпен- |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||
дикуляры к скоростям VE |
и VD , построим МЦС стержня DE. По направле- |
||||||||||||
|
|
|
|
|
|
|
|
|
|||||
нию вектора VD |
определяем направление поворота стержня DE вокруг цен- |
||||||||||||
|
|
|
|
|
|
|
|||||||
тра Р2. Вектор VE направлен в сторону поворота этого стержня. Из рисунка |
|||||||||||||
4.12 видно, что |
Р2ED = |
|
Р2DE = 30°, откуда Р2Е = Р2D. Составив пропор- |
||||||||||
цию, найдем VE: |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
VE |
|
|
VD |
, VE = VD = 0,46 м/с. |
||
|
|
|
|
|
|
EP |
|
|
|
||||
|
|
|
|
|
|
|
|
DP |
|||||
|
|
|
|
2 |
2 |
|
|||||||
4. Определяем ω2. Так как МЦС стержня 2 известен (точка Р2) и
101

Р2D = |
2 |
|
0,69 м, то |
2 = |
VD |
0,67 рад/с. |
||
2 cos 30o |
DP |
|||||||
|
|
|
|
|
|
|
2 |
|
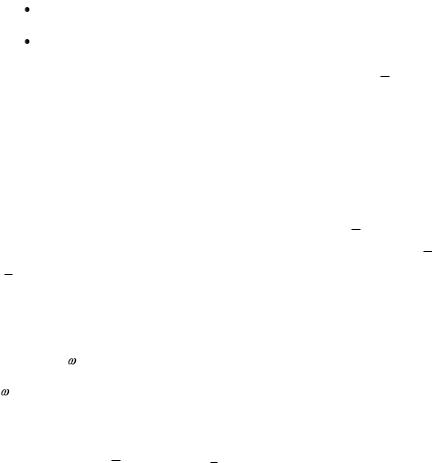
5. Определяем |
|
B |
(рисунок 4.13, на котором изображаем все векторы |
|||||
a |
||||||||
ускорений). Точка В принадлежит стержню АВ. Чтобы найти aB , надо знать ускорение какой-нибудь другой точки стержня АВ и траекторию точки В. По
данным задачи |
можем |
определить |
|
|
|
|
|
|
|
|
A |
|
|
|
|
An |
|
|
A , |
где |
численно |
||||||||||||||||||||||||||||||||||||
|
|
|
a |
a |
a |
||||||||||||||||||||||||||||||||||||||||||||||||||||
aA = |
1·ℓ1 = 2,8 м/с2, |
aAn = 12 ·ℓ1 = 1,6 м/с2. Вектор |
|
An |
направлен вдоль АО1, а |
||||||||||||||||||||||||||||||||||||||||||||||||||||
a |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
A – |
перпендикулярно АО1. |
Изображаем эти векторы на рисунке. Так как |
|||||||||||||||||||||||||||||||||||||||||||||||||||||
a |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
точка В одновременно принадлежит ползуну, то вектор |
|
B |
параллелен на- |
||||||||||||||||||||||||||||||||||||||||||||||||||||||
a |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
правляющим ползуна. Изображаем вектор |
|
|
B |
на чертеже, |
полагая, что он |
||||||||||||||||||||||||||||||||||||||||||||||||||||
a |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
направлен в ту же сторону, что и VB . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
E |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
О2 |
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|||||
|
|
|
х |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
А |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
a |
A |
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
n |
30° |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
aB |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
a A |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
1 |
60° |
|
|
|
1 |
|
D |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
aBAn |
|
|
|
|
|
|
|
|
|
|
|
|
|
B |
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
О1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a A |
|
|
|
|
|
|
|
|
|
30° |
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
An |
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
BA |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
Рисунок 4.13 |
|
|
|
|
|
|
|
у |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
Для определения |
|
|
|
B воспользуемся равенством: |
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
a |
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
B |
|
|
A |
|
|
|
|
|
|
An |
|
|
|
|
BA |
|
|
|
|
|
|
BAn . |
|
|
|
|
|
|
|
|
(*) |
|||||||||||||
|
|
|
|
|
|
|
|
a |
a |
|
|
a |
a |
|
|
|
a |
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
Изображаем на чертеже векторы |
|
|
n |
(вдоль ВА от В к А) и |
|
|
(в любую |
||||||||||||||||||||||||||||||||||||||||||||||||||
a |
a |
BA |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
BA |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
сторону перпендикулярно ВА). Вычислим значение нормального ускорения aBAn = 32 ·ВА, учитывая, что ВА = ℓ3. Для этого найдѐм ω3 с помощью построенного МЦС (Р3) стержня 3, получим:
102

|
|
VA |
|
VA |
|
n |
2 |
3 |
= |
|
|
|
0,66 |
рад/с, aBA |
= 0,61 м/с . |
P3 A |
|
3 cos30 |
|||||
|
|
|
|
|
|
Таким образом, у величин, входящих в равенство (**), неизвестны только числовые значения aB и aBA ; их можно найти, спроецировав обе час-
ти равенства на какие-либо две взаимно перпендикулярные оси. Чтобы определить аВ, спроецируем обе части равенства (*) на направление ВА (ось Bх),
перпендикулярное неизвестному вектору aBA . Тогда получим:
aB cos30 aA cos60 |
aAn cos30 aBAn . |
||
Подставив все числовые значения, найдем, что аВ = 0,72 м/с2. |
|||
Так как получилось аВ > 0 то, |
следовательно, вектор |
|
B направлен, |
a |
|||
как показано на рисунке 4.13. |
|
|
|
6. Определяем ε3. Для определения ε3, вычислим aBA . Для этого обе
части равенства (*) спроецируем на направление, перпендикулярное АВ (ось Bу). Тогда получим:
|
aB sin 30 |
aA sin 60 |
aAn sin 30 |
|
|
aBA . |
|
|||||
|
Подставив числовые |
значения |
всех |
величин |
найдем, что |
|||||||
aBA |
3,58 м/с. Знак минус указывает, что направление |
|
|
BA |
противополож- |
|||||||
a |
||||||||||||
но, показанному на рисунке 4.13. |
|
|
|
|
|
|
|
|
|
|
||
|
Теперь из равенства aBA = 3·ВА получим |
3 = |
|
aBA |
|
|
2,56 рад/с2 |
|||||
|
|
|
|
|||||||||
|
|
|
|
|
|
|
||||||
|
|
3 |
||||||||||
|
|
|
|
|
|
|
|
|||||
|
Ответ: VE = 0,46 м/с, VB = 0,46 м/с, ω2 |
= 0,67 рад/с, аВ = 0,72 м/с2, |
||||||||||
3 = 2,56 рад/c2. |
|
|
|
|
|
|
|
|
|
|
|
|
ЗАДАНИЯ ДЛЯ САМОСТОЯТЕЛЬНОЙ РАБОТЫ
Каждое задание состоит из семи задач. Рисунки по вариантам представлены на страницах 117 - 141.
Первые шесть задач имеют общие условия, различные исходные данные и рисунки. Номер рисунка соответствует номеру задачи.
УСЛОВИЯ ЗАДАЧ
Задача 1. Требуется для заданного положения механизма: установить вид движения каждого звена механизма; определить величину и построить вектор скорости точки А; построить вектор скорости точки В и определить его величину,
применяя теорему о проекциях скоростей двух точек плоской фигууры на прямую, проходящую через эти точки;
103
найти положения мгновенных центров скоростей всех звеньев, совершающих плоскопараллельное движение; построить векторы скоростей всех обозначенных на рисунке точек звеньев механизма.
Задача 2. Тело 1 движется поступательно со скоростью V1 , приводя
в движение тело 3 с помощью системы нерастяжимых тросов. Определить угловые скорости тел 2 и 3, а также скорость точки С, принадлежащей телу 3 или 4.
Задача 3. Представлены два типа задач, которые рекомендуется решать с использованием понятия о мгновенном центре скоростей плоской фигуры.
1). Колесо катится без скольжения по прямолинейному рельсу или по горизонтальной поверхности. Требуется определить угловую скорость колеса
и скорость его точки М, если скорость точки О колеса равна VO .
2). Две параллельные рейки движутся с постоянными скоростями V1 и
V2 . Между рейками зажат диск, катящийся по рейкам без скольжения. Требуется найти угловую скорость диска и скорость точки М.
Задача 4. Зубчатое колесо 1 радиусом R1 вращается вокруг оси, проходящей через точку О перпендикулярно плоскости рисунка, с угловой скоростью 1. Вокруг той же оси вращается кривошип ОА, соединенный шарнирно с центром зубчатого колеса 2 радиусом R2, с угловой скоростью OA. Требуется определить положение мгновенного центра скоростей колеса
2, угловую скорость этого колеса и скорость точки В.
Задача 5. Колесо катится без скольжения по прямолинейному рельсу или по горизонтальной поверхности. Центр колеса имеет в данный момент
времени скорость VO и ускорение aO .Требуется определить скорость и ускорение точки М.
Задача 6. На рисунках к задачам изображены схемы простейших механизмов. В некоторых задачах задаются параметры вращательного, а в некоторых – поступательного движения одного из звеньев механизма. Требуется для заданного положения звеньев механизма определить скорости и ускорения точек В и С.
Примечание − Все задачи под номерами 5 и 6 можно разделить на два типа. К первому типу относятся задачи, в которых не известно направление искомого ускорения точки звена. В этом случае можно определить угловое ускорение звена как производную по времени от его угловой скорости, так как расстояние от точки, ускорение которой известно, до мгновенного
104
центра скоростей звена остается постоянным во все время движения. Это задачи, в которых рассматриваются диски или зубчатые колеса, катящиеся по неподвижным поверхностям без скольжения.
В задачах второго типа известна линия действия определяемого ускорения точки, а угловое ускорение находится после того, как будет найдено касательное ускорение этой точки во вращательном движении звена вокруг полюса.
ВАРИАНТЫ ЗАДАНИЙ
Задание 4.01
4.01.1. О1А = 21 см, O1 A = 2 рад/c, О1АВ = 90°, α = 30 .
4.01.2.V1 = 24 см/с, R2 = R3 = 2r2 = 12 см.
4.01.3.VO = 10 см/с, R = 5 см, α = 60 .
4.01.4.ω1 = 4 рад/с, ωОА = 6 рад/с, R1 = R2 = 30 см.
4.01.5.аO = 12 см/с2, VO = 24 см/с, R = 15 см, r = 12 см.
4.01.6.аА = 30 см/с2, VА = 30 см/с, АВ = 30 см, АС = 20 см.
4.01.7.Пресс имеет штемпель 1, который приводится в движение шатунами 2. При вращении винта 3, имеющего правую и левую нарезки, гайки 4, перемещаясь по винту, приводят в движение шатуны. Определить скорость и ускорение штемпеля в момент, когда угол наклона стержня АВ к горизонту
α= 60 , если гайка А движется по винту равномерно со скоростью 5 см/с, а длина АВ равна 2,5 м.
Задание 4.02
4.02.1. О1А = 15 см, O1 A = 2 рад/с, О1АВ = 90 , α = 105 .
4.02.2.V1 = 30 см/с, R2 = 6 см, R3 = 5 см, r2 = 4 см.
4.02.3.VO = 10 см/с, R = 2r = 10 см.
4.02.4.ω1 = 2ωОА = 2 рад/с, R1 = 5 см, R2 = 3 см.
4.02.5.аO = 5 см/с2, VO = 20 см/с, R = 5 см.
4.02.6.εОА = 2 рад/с2, ωОА = 4 рад/с, АВ = 4ОА = 2ВС = 40 см.
105

4.02.7. Механизм качания хобота ВС машины для завалки в мартеновскую печь материала состоит из кривошипа ОА длиной 300 мм, вращающегося с угловой скоростью, соответствующей 20 об/мин, и шатуна АВ, соединенного с хоботом ВС, который качается вокруг точки О1. Определить угловую скорость хобота ВС и скорость точки С мульды D в момент, когда хобот горизонтален, а кривошип образует угол 30 с горизонтом, если О1В = 3000 мм, О1С = 4600 мм. Точки В и О лежат на одной вертикали.
с горизонтом, если О1В = 3000 мм, О1С = 4600 мм. Точки В и О лежат на одной вертикали.
Задание 4.03
4.03.1. О1А = 30 см, O1 A = 2 рад/с, О1АВ = 30 , α = 120 .
4.03.2.V1 = 21 см/с, R2 = R3 = 4 см, r2 = r3 = 3 см.
4.03.3.VO = 20 см/с, R = 4 см, OM = 3 см.
4.03.4.ω1 = ωОА = 2 рад/с, R1 = 8 см, R2 = 3 см.
4.03.5.аO = 8 см/с2, VO = 16 см/с, R = 5 см, r = 4 см.
4.03.6.εОА = 1 рад/с2, ωОА = 4 рад/с, АВ = 2ОА = 20 см, АС = 15 см.
4.03.7.Качающийся конвейер имеет желоб, соединенный с ползуном В.
При вращении кривошипа ОА, соединенный с ним звеном АА1 стержень О1А1 передает колебательное движение желобу с помощью тяги А1В. Определить скорость желоба для левого крайнего горизонтального положения кривошипа
ОА, а также в момент, когда АА1 параллельно ОО1, если кривошип ОА вращается равномерно, делая 90 оборотов в минуту, ОА = О1А1 = АА1 = 60 см,
А1В = 300 см, ОО1 = 48 см.
Задание 4.04
4.04.1. О1А = 15 см, O1 A = 2 рад/с, О1АВ = 120 , α = 60 . 4.04.2. V1 = 40 см/с, R2 = 2r2 = 8 см, r3 = 4 см, R3 = 6 см.
4.04.3.VO = 24 см/с, R = 10 см, r = 8 см.
4.04.4.ω1 = 4 рад/с, ωОА = 6 рад/с, R1 = 3R2 = 6 см.
4.04.5.аO = 6 см/с2, VO = 12 см/с, R = 30 см.
4.04.6.εОА = 2 рад/с2, ωОА = 6 рад/с, ОА = 30 см, АС = СВ.
4.04.7.Найти скорость ползуна С кривошипно-коленного механизма чеканочного пресса в положении, указанном на чертеже, при следующих данных: кривошип О1А делает 30 оборотов в минуту, О1А = 15 см,
106

АВ = 60 см, О2В = ВС = 40 см, α = 15 , точки О1 и В в данный момент лежат на одной горизонтали, точки О2 и С – на одной вертикали.
Задание 4.05
4.05.1. О1А = 20 см, O1 A = 3 рад/с, О1АВ = 120 , α = 45 .
4.05.2.V1 = 35 см/с, R2 = 7 см, R3 = 6 см, r2 = r3 = 4 см.
4.05.3.VO = 8 см/с, R = 4 см, α = 60 .
4.05.4.ω1 = 4 рад/с, ωОА = 3 рад/с, R1 = 5R2 = 50 см.
4.05.5.аO = 15 см/с2, VO = 30 см/с, R = 2r = 10 см.
4.05.6.аА = 20 см/с2, VА = 40 см/с, АВ = 2АС = 10 см.
4.05.7.На рисунке изображена схема кривошипно-рычажного механизма. Найти скорость ползуна D, если кривошип О1А = 14 см вращается с угло-
вой скоростью O A = 3 рад/с и в данный момент времени находится в гори- |
|
1 |
|
зонтальном положении. АВ = 50 см, СD = 55 см, О2В = О2С = 24 см, |
|
DСО2 = О1АВ = 150 , О2В АВ и О2D |
О1А. |
Задание 4.06 |
|
4.06.1. О1А = 15 см, O A = 2 рад/с, |
О1АВ = 60 , α = 45 . |
1 |
|
4.06.2.V1 = 18 см/с, R2 = 3 см, R3 = 5 см, r3 = 4 см.
4.06.3.VO = 15 см/с, R = 4 см, r = 3 см.
4.06.4.ω1 = 6 рад/с, ωОА = 8 рад/с, R1 = 2R2 = 60 см.
4.06.5.аO = 24 см/с2, VO = 30 см/с, R = 6 см.
4.06.6.εОА = 1 рад/с2, ωОА = 3 рад/с, ОА = АС = 10 см.
4.06.7.В механизме Чебышева шатун АВС изогнут под углом в 135 . Определить скорости точек В и С, если кривошип ОА длиной r вращается с постоянной угловой скоростью ω0А и занимает в данный момент крайнее
правое положение, образуя с АВ угол α = 45 . Принять АВ = О1В = r 
 2 ,
2 ,
ВС = 2r.
107

Задание 4.07
4.07.1. О1А = 10 см, O1 A = 3 рад/c, О1АВ = 30 , α = 60 .
4.07.2.V1 = 40 см/с, R2 = 5 см, R3 = 4 см, r2 = 3 см.
4.07.3.VO = 16 см/с, R = 4 см.
4.07.4.ω1 = 1,5 рад/с, ωОА = 2 рад/с, R1 = 4R2 = 8 см.
4.07.5.аO = 8 см/с2, VO = 12 см/с, R = 6 см, r = 4 см.
4.07.6.εОА = 2 рад/с2, ωОА = 4 рад/с, АВ = 20 см, АС = 6 см.
4.07.7.Поршень 3 приводится в движение кривошипно-шатунным механизмом ОАВ через зубчатый сегмент 1 и зубчатую рейку 2. Определить
скорость поршня в положении механизма, указанном |
на рисунке, если |
= 30 , = 60 , а угловая скорость кривошипа ОА равна |
OА. Размеры зада- |
ны на рисунке. |
|
Задание 4.08 |
|
4.08.1. О1А = 20 см, O1 A = 1 рад/с, О1АВ = 135 , α = 15 .
4.08.2.V1 = 18 см/с, R2 = 6 см, R3 = r2 = 3 см.
4.08.3.VO = 12 см/с, R = 5 см, r = 3 см.
4.08.4.ω1 = ωОА = 2 рад/с, R1 = 2R2 = 16 см.
4.08.5.аO = 12 см/с2, VO = 48 см/с, R = 6 см.
4.08.6.εОА = 2 рад/с2, ωОА = 4 рад/с, ОА = 3АС = 30 см.
4.08.7.В механизме паровой машины кривошип ОА длиной r вращается
сугловой скоростью ωOА. Определить угловую скорость звена СD и модуль
скорости точки С в момент, когда = 90 , если при этом точки О, В, С лежат на одной прямой, а отрезок ВD ОВ. Расстояние ВD = b, длина СD = а.
Задание 4.09
4.09.1. О1А = 15 см, O1 A = 3 рад/с, О1АВ = 30 , α = 120 .
4.09.2.V1 = 18 см/с, R2 = 3 см, R3 = 2r3 = 4 см.
4.09.3.VO = 16 см/с, R = 4 см, СМ = 3 см.
108

4.09.4.ω1 = 2 рад/с, ωОА = 6 рад/с, R1 = 3R2 = 60 см.
4.09.5.аO = 9 см/с2, VO = 36 см/с, R = 10 см, r = 9 cм.
4.09.6.εОА = 2 рад/с2, ωОА = 4 рад/с, ОА = АС = 25 см, АВ = 40 см.
4.09.7.Привод качающегося конвейера для перемещения угля состоит из
кривошипа ОА длиной 90 см, вращающегося со скоростью 57,5 об/мин, шатуна АВ, качателя О1С длиной 270 см и шарнирно прикрепленной к качателю штанги СD, передающей движение желобу с углем. Определить скорость желоба в тот момент, когда кривошип образует угол 60 с вертикалью, зная, что при этом шатун АВ и штанга СD горизонтальны, О1В = 160 см.
с вертикалью, зная, что при этом шатун АВ и штанга СD горизонтальны, О1В = 160 см.
Задание 4.10
4.10.1. О1А = 12 см, O1 A = 4 рад/с, О1АВ = 105 , α = 75 .
4.10.2.V1 = 24 см/с, R2 = R4 = 2r2 = 6 см.
4.10.3.VO = 20 см/с, R = 12 см, r = 10 см.
4.10.4.ω1 = 20 рад/с, ωОА = 40 рад/с, R1 = 2R2 = 20 см.
4.10.5.аO = 24 см/с2, VO = 36 см/с, R = 12 см.
4.10.6.εОА = 2 рад/с2, ωОА = 3 рад/с, ОА = 20 см, АС = СВ.
4.10.7.Определить скорость поршня Е механизма насоса в положении,
указанном на рисунке, если ОА = 20 см, О1В = О1D. Кривошип ОА вращается равномерно с угловой скоростью 2 рад/с.
Задание 4.11
4.11.1. О1А = 11 см, O1 A = 5 рад/с, О1АВ = 45 , α = 15 .
4.11.2.V1 = 24 см/с, R2 = 10 см, R3 = 8 см, r2 = 6 см.
4.11.3.VO = 24 см/с, R = 8 см, ОС = 4 см, СМ = 5 см.
4.11.4.ω1 = 3 рад/с, ωОА = 2 рад/с, R1 = 2R2 = 20 см.
4.11.5.аO = 9 см/с2, VO = 30 см/с, R = 5 см, r = 3 cм.
4.11.6. аА = 10 см/с2, VА = 20 см/с, СВ = АС = 20 см.
109

4.11.7. Точильный станок приводится в движение педалью ОА = 24 см,
которая колеблется около оси О по закону φ = |
|
sin |
t |
радиан (угол φ от- |
|
6 |
2 |
||||
|
|
|
считывается от горизонтали). Точильный камень К вращается вокруг оси О1 с помощью стержня АВ. Оси О и О1 перпендикулярны плоскости рисунка. Найти скорость точки D, лежащей на ободе точильного камня радиусом R = 2 ВО1, при t = 0, если в этот момент времени ОА и О1В расположены горизонтально.
Задание 4.12
4.12.1. О1А = 13 см, O1 A = 3 рад/с, О1АВ = 30 , α = 15 .
4.12.2.V1 = 30 см/с, R3 = 2R2 = 6 см, r3 = 4 см.
4.12.3.VO = 12 см/с, R = 6 см, ОС = 3 см.
4.12.4.ω1 = 5 рад/с, ωОА = 20 рад/с, R1 = 2R2 = 70 см.
4.12.5.аO = 6 см/с2, VO = 24 см/с, R = 7 см, r = 6 cм.
4.12.6.εОА = 1 рад/с2, ωОА = 2 рад/с, ОА = 25 см, АВ = 2АС = 30 см.
4.12.7.Поршень D гидравлического пресса приводится в движение посредством шарнирно-рычажного механизма ОАВD. Рычаг ОL имеет угловую скорость ω = 2 рад/с. Определить скорость поршня D и угловую скорость звена АВ, если ОА = 15 см.
Задание 4.13
4.13.1. О1А = 8 см, O1 A = 5 рад/с, О1АВ = 150 , α = 60 .
4.13.2.V1 = 28 см/с, R3 = 2R2 = 4 см, r3 = 3см.
4.13.3.V1 = 0, V2 = 16 см/с, R = 5 см, r = 3 см, α = 30 .
4.13.4.ω1 = 3 рад/с, ωОА = 4 рад/с, R1 = 2R2 = 8 см.
4.13.5.аO = 21 см/с2, VO = 7 см/с, R = 7 см.
4.13.6.аА = 10 см/с2, VА = 20 см/с, АВ = 30 см.
4.13.7.Подвижное лезвие L ножниц для резки металла приводится в движение шарнирно-рычажным механизмом АОВD. Определить скорость
110