

Лабораторная работа № 4. Исследование нелинейных сау Цель работы
– построение моделей нелинейных систем в пакете Simulink;
– исследование влияния различных видов НЭ на выходные характеристики линейных систем первого, второго и третьего порядков;
– исследование возникновения и устойчивости автоколебаний нелинейных систем в зависимости от параметров линейной части, амплитуды и частоты входного воздействия.
Краткие теоретические сведения
Большинство реальных систем содержат разного рода нелинейные элементы, изменяющие характер работы системы и придающие ей новые свойства. В то время как устойчивость линейных систем определялась лишь характеристиками входящих в них элементов, устойчивость и качество процессов нелинейных систем зависит также от величины сигналов и величины начальных условий.
Рисунок 4.1. – Отличие переходных процессов нелинейных и линейных систем
Таким образом, нелинейная система, устойчивая в малом (при малых воздействиях), может оказаться неустойчивой в большом. Помимо сходящихся и расходящихся переходных процессов, в нелинейных системах могут возникать устойчивые автоколебания – периодическое движение системы, самопроизвольно возникающее при ее включении. Такие колебания – результат внутренних свойств системы, обусловленных наличием нелинейного элемента. Для нелинейных систем не выполняется принцип суперпозиции.
В табл. 4.1 приведены статические характеристики основных типов нелинейных элементов (НЭ), рассматриваемых в ТАУ, и блоки, с помощью которых НЭ моделируются в Simulink (библиотека Discontinuities). Табл. 4.2 содержит графические изображения и основные параметры соответствующих блоков Simulink.
Таблица 4.2 Виды нелинейных элементов
(Насыщение Saturation) |
(Зона нечувствительности Dead Zone) |
(Трехпозиционное реле с гистерезисом Relay+Relay) |
(Реле с гистерезисом Relay) |
(Трехпозиционное реле Relay+Relay) |
(Двухпозиционное реле Relay) |

Таблица 4.2 Модели нелинейных звеньев в Simulink
|
Saturation – насыщение, в параметрах задаются верхний и нижний пределы (Upper limit и Lower limit). |
|
Dead zone – нечувствительность, «мертвая зона». В параметрах задаются пределы нечувствительности (Start of dead zone и End of dead zone). |
|
Relay – реле, в параметрах задаются точки переключения (Switch on point и Switch off point), в также величины сигналов в режимах «включено» (Output when on) и «выключено» (Output when off). |



Динамика нелинейных систем описывается нелинейными дифференциальными уравнениями, которые не имеют общего решения. Поэтому большую роль при исследовании нелинейных систем приобретают различные приближенные методы расчета и методы моделирования.
Реальные
нелинейные САУ содержат различные
комбинации НЭ. Однако универсальный
учет всех нелинейностей чрезвычайно
затруднителен и на практике нецелесообразен,
поскольку преобладающее влияние имеет
лишь одна-две нелинейности. Большинство
реальных систем может быть приведено
к виду, который изображен на рис. 4.2.
где обозначено
![]() – нелинейный элемент,
– нелинейный элемент,![]() – передаточная функция линейной части
системы.
– передаточная функция линейной части
системы.
Рисунок 4.2. – Структурная схема нелинейной системы
Наиболее распространенным инженерным методом анализа нелинейных САУ является метод гармонической линеаризации. Сущность метода заключается в замене НЭ линейным, таким, чтобы его выходной сигнал соответствовал первой гармонике сигнала на выходе нелинейного элемента. Такой способ линеаризации возможен и правомерен, только тогда, когда линейная часть системы представляет собой фильтр низких частот, не пропускающий высшие гармоники. Обычно в реальных САУ такое условие выполняется за счет работы НЭ в контуре с линейной передаточной функцией.
Коэффициент гармонической линеаризации для неоднозначных нелинейностей представляет собой комплексную величину, определяемую выражениями:
![]() ; (4.1)
; (4.1)
![]() ; (4.2)
; (4.2)
![]() , (4.3)
, (4.3)
где S – площадь петли неоднозначного нелинейного элемента. Для рассматриваемых в лабораторной работе видов НЭ гармонические коэффициенты линеаризации приведены в табл. 2.4.
Условия возникновения автоколебаний и их параметры следуют из уравнения гармонического баланса
![]() . (4.4)
. (4.4)
Широко
распространен графический метод решения
уравнения гармонического баланса (метод
Гольдфарба). Для этого на комплексной
плоскости строят амплитудно-фазовую
характеристику (АФХ) линейной части
![]() и обратную гармоническую характеристику
нелинейного элемента
и обратную гармоническую характеристику
нелинейного элемента
 . (4.5)
. (4.5)
Пересечение этих кривых указывает на возможность возникновения автоколебаний (рис. 4.3).
Рис. 4.3. Иллюстрация способа Гольдфарба
При
этом, если, перемещаясь по кривой
![]() в сторону возрастания амплитуд, выходим
из контура, охваченного
в сторону возрастания амплитуд, выходим
из контура, охваченного
![]() ,
то точке пересечения соответствуют
устойчивые автоколебания (точка 1), а
если входим в контур, – неустойчивые
(точка 2). В точке устойчивых автоколебаний
определяется частота автоколебаний
,
то точке пересечения соответствуют
устойчивые автоколебания (точка 1), а
если входим в контур, – неустойчивые
(точка 2). В точке устойчивых автоколебаний
определяется частота автоколебаний
![]() по кривой
и амплитуда автоколебаний
по кривой
и амплитуда автоколебаний
![]() по
кривой
.
Точка неустойчивых автоколебаний
разграничивает режимы работы системы
в зависимости от начальных условий.
по
кривой
.
Точка неустойчивых автоколебаний
разграничивает режимы работы системы
в зависимости от начальных условий.
Если кривые и нигде не пересекаются, то система либо устойчива в целом – целиком расположена вне контура, охваченного , либо в противном случае неустойчива.
В системе с однозначными статическими характеристиками нелинейных элементов удобно для анализа устойчивости и автоколебаний использовать логарифмические характеристики (рис. 2.4). При этом частоту автоколебаний определяют из условия баланса фаз
![]() , (4.6)
, (4.6)
а амплитуду из условия баланса амплитуд
![]() , (4.7)
, (4.7)
где
![]() – логарифмическая гармоническая
характеристика нелинейного элемента.
– логарифмическая гармоническая
характеристика нелинейного элемента.
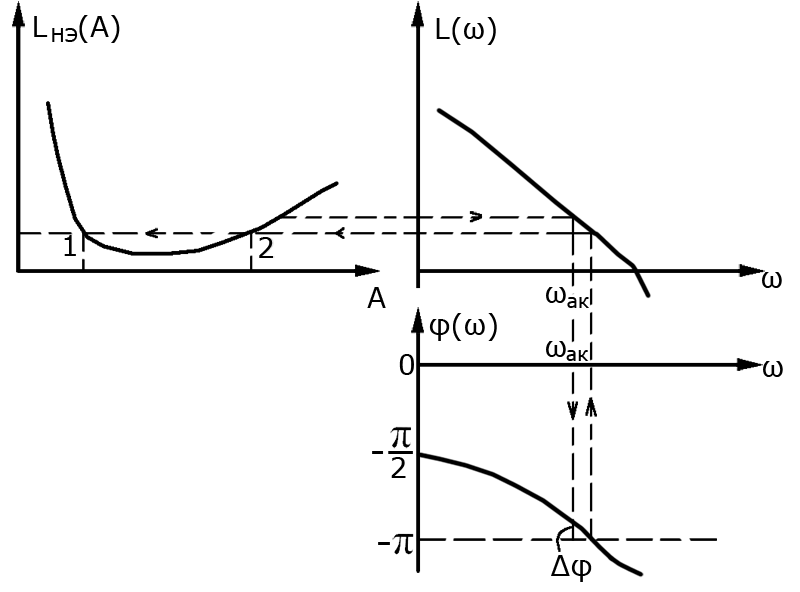
Рисунок 4.4 – Использование ЛАЧХ для анализа устойчивости автоколебаний
Для проверки устойчивости автоколебаний необходимо дать небольшое приращение амплитуде относительно исследуемой точки и путем обратного перестроения возвратиться к фазовой характеристике. Если при этом запас устойчивости по фазе существует, то автоколебания в исследуемой точке устойчивы (точка 2 рис. 4.4).
В
лабораторной работе исследуются
замкнутые системы с передаточными
функциями вида
 ,
где (n=1,2,3) и различными видами
нелинейных элементов.
,
где (n=1,2,3) и различными видами
нелинейных элементов.