

6.2. Способы построения схем переменных состояния
Набор внутренних переменных системы, определяющих вектор состояния X(t), может быть различным, т.е. для исследуемой системы существует множество групп переменных состояния
X(1)(t)=![]() ,
X(2)(t)=
,
X(2)(t)=![]() ,…,
,…,
таких, что каждая из них описывает состояние полностью, причем любые два вектора X(i)(t) и X(j)(t) из этого множества будут однозначно связаны между собой. Удачный выбор переменных состояния часто приводит к существенному упрощению математического описания САУ.
Естественным является стремление выбрать в качестве составляющих вектора состояния контролируемые выходные сигналы системы, характеризующие качество процесса управления, но их обычно бывает недостаточно для полного математического описания САУ. Выбор вектора переменных состояния осуществляется одним из следующих трех способов, называемых методами программирования:
прямого;
параллельного;
последовательного.
Кроме того, возможны комбинированные способы, когда часть системы строится, например, методом параллельного программирования, а остальная часть – методом последовательного программирования.
Метод прямого программирования
Пусть передаточная функция системы имеет вид:
 .
(6.9)
.
(6.9)
Разделив
числитель и знаменатель W
(р} на
![]() ,
получим:
,
получим:
 .
.
Выходной сигнал системы равен:
 .
.
Введем
в рассмотрение фиктивную переменную
![]() ,
равную:
,
равную:
 .
.
Преобразуем последнее выражение к виду:
![]()
![]()
![]() .
(6.10)
.
(6.10)
Тогда выходной сигнал системы может быть выражен следующим образом:
![]()
![]() .
(6.11)
.
(6.11)
На
основании выражений (6.10) и (6.11) составим
структурную схему системы (рис. 6.2) с
передаточной функцией (6.9), содержащую
только пропорциональные звенья и
![]() последовательно
соединенных интегрирующих звеньев.
последовательно
соединенных интегрирующих звеньев.
О чевидно,
что в качестве переменных состояния,
полностью описывающих поведение такой
системы, могут быть выбраны выходные
сигналы интегрирующих звеньев:
чевидно,
что в качестве переменных состояния,
полностью описывающих поведение такой
системы, могут быть выбраны выходные
сигналы интегрирующих звеньев:
X(t)
=
![]() .
.
Особый интерес представляют схемы переменных состояния простейших звеньев (рис. 6.3) с передаточными функциями вида:
а)
 ;
;
б)
 ;
;
в)
 ;
;
г )
) .
.
Метод параллельного программирования
Для
построения схем переменных состояния
способом параллельного программирования
передаточная функция системы (6.9),
имеющая в общем случае
![]() действительных и
действительных и![]() пар
комплексно-сопряженных полюсов (
пар
комплексно-сопряженных полюсов (![]() ),
предварительно должна быть разложена
на сумму простейших дробей, т.е.
представлена в виде:
),
предварительно должна быть разложена
на сумму простейших дробей, т.е.
представлена в виде:
 ,
(6.12)
,
(6.12)
где
![]() коэффициенты разложения.
коэффициенты разложения.
Затем для каждого из слагаемых в выражении (6.12) составляется схема переменных состояния, например, с использованием метода прямого программирования. Далее все (q+ z + 1) таких схем соединяются между собой параллельно. Схема переменных состояния, соответствующая выражению (6.12), представлена на рис. 6.4. Так же, как и в предыдущем случае, переменными состояния являются выходные величины интеграторов.

Метод последовательного программирования
Для построения схем переменных состояния способом последовательного программирования передаточная функция (6.9) в зависимости от числа и вида ее нулей и полюсов должна быть представлена в виде последовательного соединения элементарных звеньев с передаточными функциями вида:
![]() ;
;
![]() ;
;![]() ;
;
 ;
;
 .
.
В
качестве переменных состояния также
выбираются выходные величины интегрирующих
звеньев, выходной сигнал системы
![]() в этом случае
обычно совпадает с переменной состояния
последнего звена.
в этом случае
обычно совпадает с переменной состояния
последнего звена.
В качестве примера рассмотрим описание в пространстве состояния системы (рис. 6.5).
Н а
основании метода последовательного
программирования составим схему
переменных состояния этой системы (рис.
6.6).
а
основании метода последовательного
программирования составим схему
переменных состояния этой системы (рис.
6.6).
П оскольку
в качестве переменных состояния
выбираются выходные величины интегрирующих
звеньев, производные по времени этих
переменных состояния представляют
собой входные сигналы соответствующих
интеграторов. При этом система
дифференциальных уравнений (6.2) для
рассматриваемой САУ имеет следующий
вид:
оскольку
в качестве переменных состояния
выбираются выходные величины интегрирующих
звеньев, производные по времени этих
переменных состояния представляют
собой входные сигналы соответствующих
интеграторов. При этом система
дифференциальных уравнений (6.2) для
рассматриваемой САУ имеет следующий
вид:
 (6.13)
(6.13)
Кроме
того,
![]() или
или
![]() .
(6.14)
.
(6.14)
Тогда выражения (6.13) и (6.14) в матричной форме примут вид:





и
 ,
,
т.е.
для рассматриваемой САУ:
![]()
матрица
системы A
=
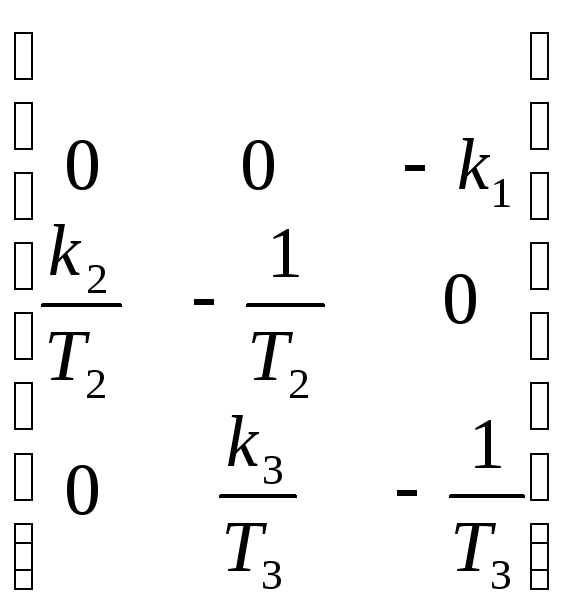 ,
матрица управленияB
=
,
матрица управленияB
=

и
матрица наблюдения
![]() .
.