

6.3. Решение уравнений состояния линейных стационарных сау. Вычисление фундаментальной матрицы
Рассмотрим методику решения уравнения состояния линейной стационарной системы, находящейся в свободном движении. При этом внешние воздействия на систему не действуют ( Xвх(t)= 0 ) и поведение системы описывается однородным векторным дифференциальным уравнением:
![]() .
(6.15)
.
(6.15)
Решение этого уравнения ищем в виде:
![]() ,
(6.16)
,
(6.16)
где Ф(t) – фундаментальная матрица; X(t0) – вектор, описывающий состояние системы в начальный момент времени t0 .
Для
стационарных линейных САУ решение
матричного уравнения (6.15) можно получить
по аналогии с решением скалярного
дифференциального уравнения
![]() в виде:
в виде:
![]() ,
(6.17)
,
(6.17)
где
![]() – матричная экспонента.
– матричная экспонента.
Из сравнения выражений (6.16) и (6.17) следует, что фундаментальная матрица равна:
Ф(t) = exp(At). (6.18)
Существует несколько способов определения фундаментальной матрицы.
Первый способ основан на известном разложении экспоненты в ряд. Для выражения (6.18) такое разложение принимает вид:
exp(At)
= 1
+
![]() ,
,
где 1 – единичная матрица.
Указанный способ определения фундаментальной матрицы обычно используется при численных расчетах для фиксированного момента времени t = t0.
При этом
exp(At0)
= 1
+ At0
+ A2
![]() +A3
+A3![]() +…….
+…….
Вычисление подобного выражения для электронных вычислительных машин является стандартной задачей, не представляющей каких-либо затруднений даже для систем высокого порядка.
Второй способ вычисления фундаментальной матрицы предполагает использование аналитического выражения для Ф(t). Для его определения выполним преобразование Лапласа над обеими частями матричного дифференциального уравнения (6.15):
![]() или
или
![]() ,
,
откуда
![]() .
(6.19)
.
(6.19)
Матрица [р1 – А] называется характеристической матрицей, ее определитель
det[p1-A] = 0
представляет собой характеристическое уравнение САУ в матричной форме.
Умножая обе части уравнения (6.19) слева на матрицу [р1–А]-1, обратную по отношению к [р1–А], получим:
X(p) = [р1 – А]-1 X(0).
Выполнив обратное преобразование Лапласа над последним уравнением, имеем
X(t) =L-1{[р1–А]-1} X(0).
Из последнего выражения следует, что фундаментальная матрица равна:
![]() (6.20)
(6.20)
В качестве примера определим фундаментальную матрицу системы, передаточная функция которой равна:
![]() .
(6.21)
.
(6.21)
Преобразуем выражение (6.21) к виду:
![]() .
(6.22)
.
(6.22)
Используя метод
прямого программирования, составляем
для рассматриваемой системы схему
переменных состояния (рис. 6.7), в качестве
которых выбираем выходной сигнал системы
и его первую производную, т.е.
![]() ,
а
,
а![]() .
.
Система дифференциальных уравнений для переменных состояния:

Кроме того,
![]() .
.
Соответствующие приведенной системе дифференциальных уравнений векторные уравнения имеют вид:
 =
= ;
;
![]()
![]() .
.
Т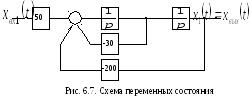 аким
образом, матрицы системы, управления и
наблюдения принимают вид:
аким
образом, матрицы системы, управления и
наблюдения принимают вид:
A ;
B
;
B
![]() ;C
;C
![]() .
.
Характеристическая матрица равна:
 .
.
Матрица, обратная характеристической, равна:
 .
.
В соответствии с выражением (6.20) фундаментальная матрица равна:
![]()
![]() =
=
 .
.