

4. Мостовая схема переменного тока
В
плечи мостовой схемы переменного тока
(рис. 6) включены полные сопротивления,
состоящие из активной и реактивной
составляющих. Будем пользоваться
комплексной формой записи полных
сопротивлений
![]() .
В
диагональ АВ
моста
включен источник переменного
синусоидального напряжения
.
В
диагональ АВ
моста
включен источник переменного
синусоидального напряжения
![]() ,
а в диагональБГ
—
измерительный прибор переменного тока.
Направления токов в плечах моста могут
быть выбраны произвольно. Ток измерительной
диагонали
,
а в диагональБГ
—
измерительный прибор переменного тока.
Направления токов в плечах моста могут
быть выбраны произвольно. Ток измерительной
диагонали
![]() (22)
(22)
где
![]() (23)
(23)
![]() (24)
(24)
![]() ,
,
![]() —
комплексные выражения, аналогичные
выражениям в уравнениях (9) и (10) для моста
постоянного тока.
—
комплексные выражения, аналогичные
выражениям в уравнениях (9) и (10) для моста
постоянного тока.
Условия равновесия моста переменного тока получим, приравнивая (22) нулю:
![]() (25)
(25)
где
![]() ;
;![]() ;
;
![]() ;
;![]()
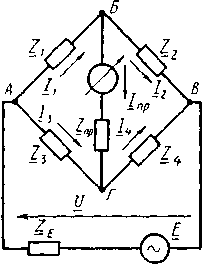
Рис. 6. Мостовая измерительная схема на переменном токе
Напомним,
что при показательной форме записи
комплексной величины модуль
![]() ,
а аргумент
,
а аргумент![]()
В соответствии с условием равновесия моста подставим в (25) значения полных сопротивлений
![]()
Представим левую и правую части в виде действительной и мнимой составляющих:
![]()
Две комплексные величины равны только в том случае, если равны порознь их действительные и мнимые части:
![]() (26)
(26)
![]() (27)
(27)
Таким
образом, получаем два независимых
условия равновесия, которые должны
выполняться одновременно. Если в мостах
постоянного тока имеется одно условие
равновесия и уравновешивание достигается
регулировкой одного сопротивления, то
в мостах переменного тока для
уравновешивания необходима регулировка
не менее двух параметров схемы. Трудность
уравновешивания моста переменного тока
состоит в том, что в процессе обеспечения
одного условия (например, равенства
произведений модулей сопротивлений в
противолежащих плечах:
![]() )
нарушается другое соотношение — между
фазовыми сдвигами:
)
нарушается другое соотношение — между
фазовыми сдвигами:![]() .
Обычно такие мосты регулируются вручную
методом последовательных приближений.
.
Обычно такие мосты регулируются вручную
методом последовательных приближений.
В некоторых частных случаях уравновешивание моста обеспечивается выполнением одного из трех условий.
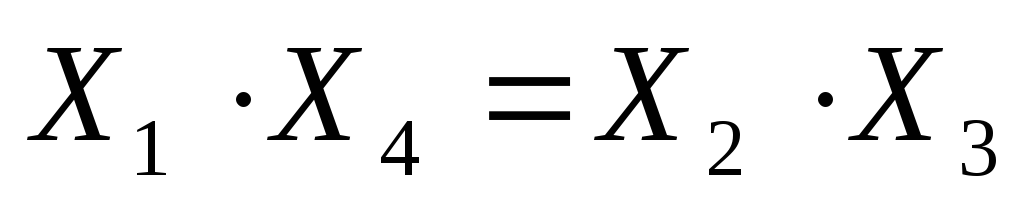
Если R1 = R2 = R3 - R4 = 0, т. е. плечи моста имеют только ре активные сопротивления, то условие равновесия
Если
 ,
т. е. плечи моста имеют только активные
сопротивления, условие равновесия
,
т. е. плечи моста имеют только активные
сопротивления, условие равновесия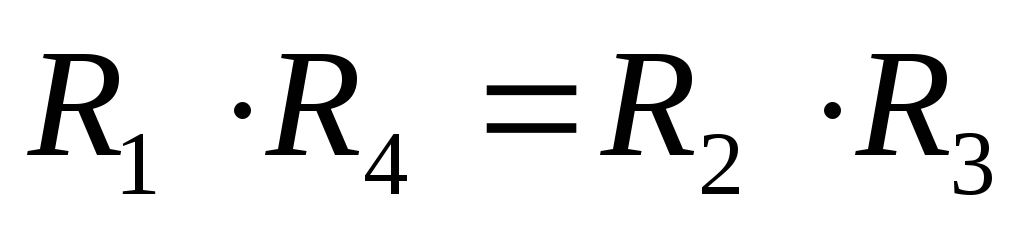
Если два соседних плеча имеют только реактивные сопротивления, а два других —только активные (любая пара соседних плеч), например
 ,
то условие равновесия
,
то условие равновесия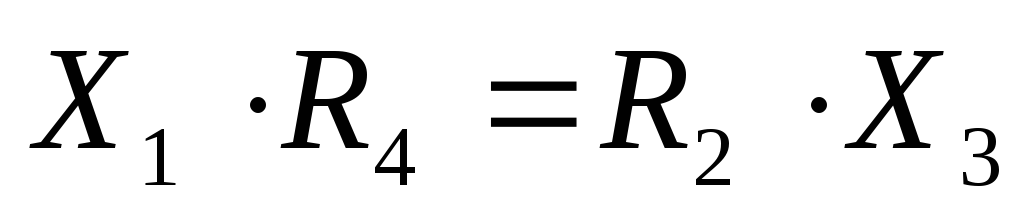
Следует иметь в виду, что катушки индуктивности всегда кроме индуктивного сопротивления имеют активное сопротивление, которое в некоторых случаях настолько мало, что им можно пренебречь.
Расчет чувствительности моста переменного тока можно провести в соответствии с (12), Считывая, что вместо R4 следует подставить комплексное сопротивление. Чувствительность моста по току
![]() (28)
(28)
чувствительность по напряжению
![]() (29)
(29)
Уравновешивание моста переменного тока может осуществляться автоматически при соотношениях сопротивлений плеч, рассмотренных для частных случаев 1—3.
Автоматическое уравновешивание мостов переменного и постоянного тока выполняется по схеме, показанной на рис. 7. Напряжение разбаланса ΔU снимается с измерительной диагонали моста и подается на исполнительный микроэлектродвигатель (ЭД) через усилитель (У). Двигатель через редуктор (Р) перемещает движок переменного резистора R до тех пор, пока не будет обеспечено условие равновесия и напряжение разбаланса ΔU не станет равным нулю. Одновременно будет перемещаться и стрелка по шкале, которая может быть проградуирована в единицах сопротивления датчика или в соответствующих этому сопротивлению единицах измеряемой неэлектрической величины.
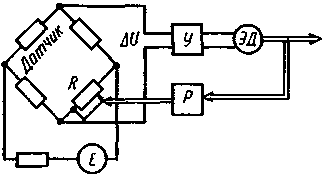
Рис. 7. Схема автоматического уравновешивания моста