

3. Настройка контактов и устройство поляризованного реле
Кроме электромагнитного усилия на якорь поляризованного реле воздействует усилие пружин, не показанных на рис. 1 и 2. В зависимости от положения неподвижных контактов и натяжения (или сжатия) пружин поляризованные реле могут настраиваться на двух- или трехпозиционную работу.
Рассмотрим настройку контактов реле на двухпозиционную работу. Пружины с двух сторон воздействуют на якорь с равными усилиями в нейтральном положении. Если усилия пружин невелики и неподвижные контакты расположены симметрично относительно нейтрали, то при отсутствии входного сигнала (тока в обмотке реле) за счет одной из составляющих поляризующего потока (Фп1 или Фп2) якорь 1 остается в том же положении, в котором он находился до снятия входного сигнала. Следовательно, остаются замкнутыми соответствующие контакты реле (например, контакты 2—3 на рис. 3,а). В этом случае механическое усилие пружин 5, стремящееся возвратить якорь в нейтральное положение, меньше тягового усилия от потока постоянного магнита, стремящегося удержать якорь в притянутом положении. При подаче тока обратной полярности в обмотку реле якорь перебрасывается в противоположное крайнее положение, размыкая контакты 2—3 и замыкая контакты 2—4. При снятии этого входного сигнала контакты 2—4 остаются замкнутыми. Даже если входной сигнал будет снят в тот момент, когда якорь находится в нейтральном положении, такое положение будет неустойчивым. При малейшем отклонении якоря от этого положения (например, из-за незначительного сотрясения или вибрации) возрастет поляризующий поток в том направлении, куда отклонился якорь, и соответствующее ему электромагнитное усилие переместит якорь до упора в том же направлении.


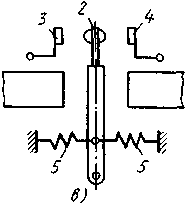
Рис. 3. Настройка контактов поляризованного реле
Таким образом, при такой настройке якорь реле занимает только два устойчивых симметричных положения (позиции): крайнее левое (замкнуты контакты 2—3) или крайнее правое (замкнуты контакты 2—4).
Возможна настройка на двухпозиционную работу с преобладанием (приоритетом) одной из позиций (рис. 3, б). Если неподвижный контакт, например 3, установить с той же стороны относительно нейтрали, что и второй неподвижный контакт 4, то тяговое усилие от потока поляризующего Фп1, стремящееся удержать якорь реле в крайнем левом положении, будет намного меньше тягового усилия от поляризующего потока Фп2, стремящегося удержать якорь в крайнем правом положении. В результате этого при снятии входного сигнала якорь реле под действием тягового усилия от потока Фп2 будет устанавливаться и удерживаться в крайнем правом положении. Таким образом, подобная настройка обеспечивает двухпозиционную настройку реле с приоритетом одной позиции. При подаче в обмотку реле тока соответствующей полярности якорь занимает крайнее левое положение (замкнуты контакты 2—3), а при подаче тока обратной полярности или при отсутствии тока в обмотке реле якорь занимает крайнее правое положение (замкнуты контакты 2—4).
Для настройки поляризованного реле на трехпозиционную работу необходимы пружины 5 большой жесткости, обеспечивающие превышение механического усилия над электромагнитным усилием от поляризующего магнита в крайних положениях якоря. В этом случае при отсутствии тока в обмотке реле его якорь будет устанавливаться в нейтральное положение при разомкнутых контактах (рис. 3, в). Таким образом, обеспечиваются три позиции (положения) якоря: 1) крайнее левое положение (замкнуты контакты 2—3) при подаче в обмотку тока соответствующей полярности; 2) крайнее правое положение (замкнуты контакты 2—4) при подаче в обмотку реле тока обратной полярности; 3) нейтральное среднее положение (все контакты разомкнуты) при снятии входного сигнала с обмотки реле.
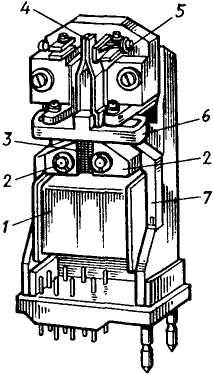 Рис.
4. Поляризованное реле типа РП-7
Рис.
4. Поляризованное реле типа РП-7
Отечественной промышленностью выпускаются поляризованные реле различных типов и с различной настройкой контактов. Например, реле типа РП-4 — двухпозиционное (с нейтральной настройкой); реле типа РП-5 — трехпозиционное; реле типа РП-7 — двухпозиционное с преобладанием. Эти реле могут иметь несколько независимых обмоток, что расширяет их возможности применения в системах автоматики.
На рис. 4 показано поляризованное реле типа РП-7, состоящее из катушки 1, полюсных наконечников 2, якоря 3, контактных пружин с подвижными контактами 4, неподвижных контактов 5, магнитопровода 6, керамической колодки 7 со штырьковыми выводами, что позволяет быстро включать реле в рабочую схему, вставляя его в соответствующую соединительную колодку.