

7. Шаговые искатели и распределители
Шаговые искатели и распределители под действием управляющего сигнала осуществляют поочередное переключение нескольких исполнительных цепей. В простейшем случае шаговый искатель (рис. 9, а) имеет один входной зажим и несколько выходных. При подаче управляющего импульса в обмотку электромагнита (ЭМ) входной зажим перемещается на один шаг, соединяясь с очередным выходным зажимом. Следовательно, номер подсоединенного выходного зажима определяется количеством импульсов, поступивших на обмотку электромагнита (ЭМ).
Устройство шагового искателя показано на рис. 9, б. По окружности расположен набор неподвижных контактов — ламелей 7.
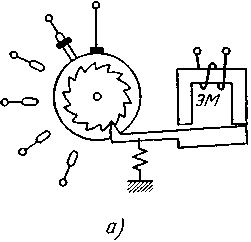
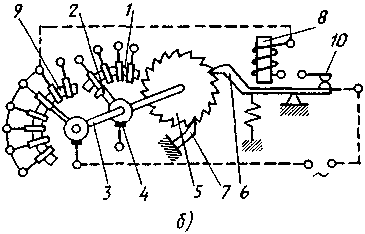
Рис. 9. Шаговые искатели
По этим ламелям скользит подвижный контакт 2, закрепленный на оси 3 и имеющий токоподвод с помощью кольца и щетки 4.
Шаговое перемещение контакта 2 осуществляется храповым механизмом, состоящим из храпового колеса 5, рабочей собачки 6 и формирующей собачки 7. Приводом храпового механизма служит электромагнит 8. При подаче в обмотку электромагнита управляющего импульса якорь притягивается к сердечнику и поворачивает храповое колесо на один зубец. В результате контакт 2 переходит с одной ламели на другую и происходит переключение во внешней цепи.
Шаговый искатель может иметь несколько рядов ламелей и контактов, укрепленных на одной оси, что позволяет увеличить число коммутируемых цепей. Шаговый механизм искателя может перемещаться лишь в одном направлении. Поэтому возврат подвижного контакта в исходное положение происходит после завершения полного оборота. Если число тактов в цикле работы шагового искателя меньше числа ламелей, то для ускоренного возврата в исходное положение используется специальный ряд ламелей 9 (рис. 9, б). Все ламели этого ряда, кроме нулевой, электрически соединены друг с другом. Цепь возврата образуется ламелями 4, катушкой электромагнита 8 и вспомогательными размыкающими контактами 10. При каждом срабатывании электромагнита 8 контакты 10 размыкаются и цепь возврата, показанная на рис. 9, б пунктиром, прерывается. Якорь электромагнита 8 возвращается в исходное положение, и контакты 10 вновь замыкаются, восстанавливая цепь возврата. В результате собачка 6 получает импульсное движение с частотой, определяемой собственной частотой электромеханической системы, и контакт 2 быстро перемещается по ламелям. Когда контакт 2 дойдет до нулевой ламели, цепь возврата размыкается и ускоренное движение шагового механизма прекращается. С помощью шагово-декадных распределителей осуществляется, например, автоматическая телефонная связь. Когда мы набираем номер вызываемого телефона, то диск телефонного аппарата дает столько импульсов, до какой цифры мы его повернули. При этом шагово-декадный распределитель произвел соединение с соответствующим выходным проводом и одновременно подключил очередную декаду ламелей (новый ряд из десяти ламелей).
В шаговых искателях разных типов число рядов ламелей может достигать 8, а число ламелей в ряду — 50. Все шаговые искатели рассчитаны на работу в импульсном режиме с частотой до 10 срабатываний в секунду.