

2. Мостовая измерительная схема постоянного тока
Принципиальная схема одинарного моста постоянного тока (рис. 2) состоит из четырех резисторов с активными сопротивлениями R1, R2, R3 и R4, которые соединены в замкнутый четырехугольник АБВГ. Входящие в схему резисторы R1— R4 называют плечами или ветвями моста. Плечи можно обозначать и буквами, например плечо АБ. В четырехугольнике АБВГ можно выделить две диагонали: АВ и БГ. В диагональ БГ моста включен измерительный прибор, имеющий активное сопротивление Rпр. В диагональ АВ включен источник питания с ЭДС Е и внутренним сопротивлением RE.
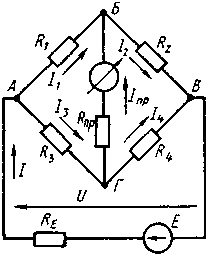
Рис. 2. Мостовая измерительная схема
Можно подобрать сопротивления плеч моста так, чтобы потенциалы точек Б и Г, между которыми включен измерительный прибор, были одинаковы. В этом случае ток в цепи прибора Inp отсутствует (Inp = 0). Процесс подбора таких сопротивлений, обеспечивающих Inp = 0, называется уравновешиванием или балансировкой моста. Условие равновесия моста может быть получено на основании законов Кирхгофа, записанных для токов в плечах моста с учетом принятых на рис. 2 направлений токов:
![]() ;
;
![]()
откуда
![]() (3)
(3)
![]() (4)
(4)
Разделив (3) на (4), получим
![]() (5)
(5)
Так как в уравновешенном мосте ток в цепи прибора Inp = 0, то I1 = I2, I3 = I4 и равенство (5) имеет вид
![]()
или
![]() (6)
(6)
т. е. условие равновесия моста можно сформулировать так: произведения сопротивлений противолежащих плеч должны быть равны.
С
помощью мостовой схемы можно измерить
неизвестное сопротивление Rx,
включив его в одно из плеч моста, например
в плечо ВГ
вместо
резистора R4.
При трех известных сопротивлениях R1,
R2,
R3
неизвестное сопротивление ![]() .
Уравновешивание моста может быть
достигнуто изменением либо одного
сопротивления (R2),
либо
отношения двух сопротивлений (
.
Уравновешивание моста может быть
достигнуто изменением либо одного
сопротивления (R2),
либо
отношения двух сопротивлений (![]() ).
В уравновешенных мостах измерительный
прибор должен быть очень чувствительным,
он должен реагировать на малые токи.
Именно по показаниям
этого прибора и фиксируется равновесие
моста. Поэтому в уравновешенных мостах
в качестве измерительного прибора
используется обычно гальванометр.
).
В уравновешенных мостах измерительный
прибор должен быть очень чувствительным,
он должен реагировать на малые токи.
Именно по показаниям
этого прибора и фиксируется равновесие
моста. Поэтому в уравновешенных мостах
в качестве измерительного прибора
используется обычно гальванометр.
Кроме уравновешенных существуют так называемые неуравновешенные (или небалансные) мосты, в которых Inp ≠ 0и измеряемое сопротивление Rx определяется именно по отклонению стрелки прибора, т. е. по величине Inp, поскольку Inp = f(Rx).
В качестве измерительного прибора в неуравновешенных мостах используются амперметры (так как токи невелики, то обычно мили- или микроамперметры). Уравновешенные мосты требуют ручной или автоматической балансировки, в то время как неуравновешенные мосты не требуют регулировки при каждом измерении. Поэтому неуравновешенные мосты проще, их чаще используют для электрических измерений неэлектрических величин.
На основании законов Кирхгофа могут быть получены выражения для тока в диагонали моста, содержащей измерительный прибор, через напряжение питания U:
![]() (7)
(7)
через ток питания I:
![]() (8)
(8)
где ![]() (9)
(9)
![]() (10)
(10)
Кстати, из (7) или (8), приравнивая Inp нулю, можно вывести уже полученное нами условие равновесия моста (6).
Сложное соединение сопротивлений R1— R4, Rпр в мостовой схеме можно преобразовать в эквивалентное сопротивление RM — входное сопротивление моста по диагонали питания АВ. Эквивалентная схема моста показана на рис. 3. В зависимости от соотношения RM и RE различают низкоомные и высокоомные мостовые измерительные схемы.
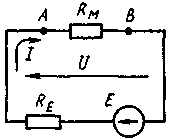 Рис.
3. Эквивалентная схема моста
Рис.
3. Эквивалентная схема моста
Если RM<<RE, то мост называется низкоомным. В таких мостах изменение сопротивления плеч почти не влияет на ток питания I, т. е. можно считать, что I ≈ const. При расчете низкоомных мостов обычно используют уравнение (8).
Если RM>>RE, то мост называется высокоомным. В этом случае постоянной величиной можно считать напряжение на зажимах моста U =E-I RE ≈ const. При расчете высокоомных мостов обычно используют уравнение (7).
Разделив (7) на (8), получим выражение для входного сопротивления моста
![]() (11)
(11)