

3. Электромагнитные реле постоянного тока
Устройство электромагнитных реле постоянного тока показано на рис. 4: а — с поворотным якорем, б — с втяжным якорем. Основные детали и узлы реле имеют следующие обозначения: 1 — катушка на каркасе; 2 — ярмо; 3 — сердечник; 4 — якорь; 5 — штифт отлипания (немагнитная прокладка); 6 — возвратная пружина; 7 — подвижные контакты; 8' и 8" — неподвижные контакты.
Магнитопровод электромагнитного механизма реле состоит из неподвижной и подвижной частей. Подвижная часть называется якорем. Неподвижная часть состоит из сердечника, который находится внутри катушки, и ярма — той части магнитопровода, которая охватывает катушку.
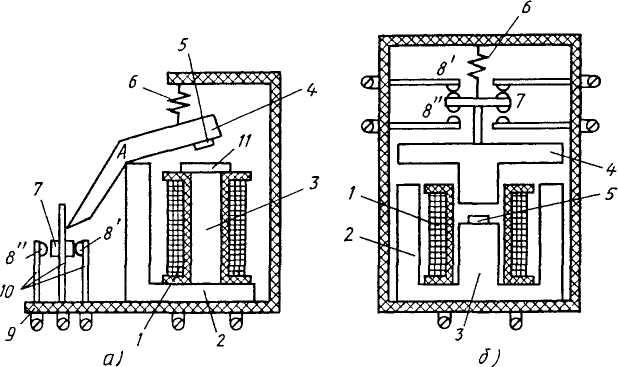
Рис. 4. Электромагнитные реле постоянного тока
В реле с поворотным якорем (рис. 4, а) электромагнитный механизм и контактный узел закреплены на общем изоляционном основании 9. При протекании тока по обмотке катушки 1 якорь 4 притягивается к сердечнику 3 и совершает поворот относительно точки опоры А. При этом якорь перемещает подвижный контакт 7, который размыкается с неподвижным контактом 8' и замыкается с неподвижным контактом 8". Контакты закреплены на плоских пружинах 10, которые служат и для подсоединения к внешней цепи. Когда ток через обмотку реле прекращается, якорь поворачивается в исходное положение.
В некоторых реле это происходит под действием силы тяжести якоря, в некоторых — под действием контактных пружин или специальной возвратной пружины 6. Для того чтобы якорь при обесточивании обмотки не прилипал к сердечнику из-за остаточного намагничивания магнитопровода, на якоре устанавливается штифт отлипания 5 — пластинка из немагнитного материала, обеспечивающая зазор примерно в 0,1 мм между якорем и сердечником при срабатывании реле. Обычно сердечник имеет полюсный наконечник 11 для уменьшения магнитного сопротивления рабочего воздушного зазора.
В электромагнитном реле с втяжным якорем (рис. 4, б) при протекании тока по обмотке катушки 1 якорь 4 втягивается внутрь ее до упора в сердечник 3. При этом подвижные мостиковые контакты 7 размыкаются с неподвижными контактами 8' и замыкаются с неподвижными контактами 8". Возврат якоря 4 в исходное положение при обесточивании реле происходит под действием возвратной пружины 6. Как и в реле с поворотным якорем, для исключения залипания якоря служит штифт 5. Для возврата якоря в исходное положение может использоваться и сила тяжести якоря.
4. Последовательность работы электромагнитного реле
Рассмотрим последовательность работы электромагнитного реле с момента подачи напряжения на обмотку реле до момента снятия напряжения с обмотки и возвращения якоря в исходное положение. Поскольку обмотка реле имеет индуктивное сопротивление, ток в ней не может измениться скачком. Изменение тока (как нарастание, так и убывание) происходит плавно по экспоненциальной кривой (рис. 5).
На рис. 5, показывающем изменение тока обмотки реле во времени, можно выделить четыре участка.
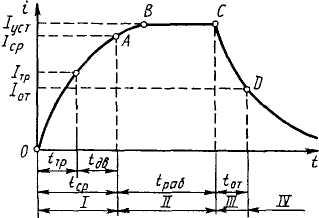
Рис. 5. График изменения тока в обмотке реле
Участок
![]() характеризует срабатывание реле. Он
начинается с момента подачи напряжения
на обмотку реле (точкаО)
и
заканчивается в момент надежного
замыкания контактов (точка А).
На
этом участке происходит срабатывание
реле, и продолжительность его называется
временем срабатывания
tср.
Сразу после подачи напряжения ток в
обмотке реле нарастает довольно быстро,
поскольку постоянная времени сравнительно
мала. Постоянная времени катушки, имеющей
сопротивление R
и
индуктивность L,
равна
отношению L/R,
а
пока якорь не начал приближаться к
сердечнику, магнитная цепь имеет большой
зазор и, следовательно, индуктивность
мала. Когда ток в обмотке реле достигнет
значения Iтр,
при котором начинает движение (трогается)
якорь, зазор начнет уменьшаться,
индуктивность будет возрастать, а
скорость нарастания тока будет
уменьшаться. Время срабатывания состоит
из времени трогания tтр
и
времени движения якоря
tдв
(tср=
tтр
+ tдв).
В точке А
ток
имеет значение tср.
Ток срабатывания больше тока трогания,
поскольку за время
tдв
продолжалось
его нарастание.
характеризует срабатывание реле. Он
начинается с момента подачи напряжения
на обмотку реле (точкаО)
и
заканчивается в момент надежного
замыкания контактов (точка А).
На
этом участке происходит срабатывание
реле, и продолжительность его называется
временем срабатывания
tср.
Сразу после подачи напряжения ток в
обмотке реле нарастает довольно быстро,
поскольку постоянная времени сравнительно
мала. Постоянная времени катушки, имеющей
сопротивление R
и
индуктивность L,
равна
отношению L/R,
а
пока якорь не начал приближаться к
сердечнику, магнитная цепь имеет большой
зазор и, следовательно, индуктивность
мала. Когда ток в обмотке реле достигнет
значения Iтр,
при котором начинает движение (трогается)
якорь, зазор начнет уменьшаться,
индуктивность будет возрастать, а
скорость нарастания тока будет
уменьшаться. Время срабатывания состоит
из времени трогания tтр
и
времени движения якоря
tдв
(tср=
tтр
+ tдв).
В точке А
ток
имеет значение tср.
Ток срабатывания больше тока трогания,
поскольку за время
tдв
продолжалось
его нарастание.
В
точке А
закончилось
движение якоря. Начинается участок II,
характеризующий реле в рабочем состоянии.
Продолжительность этого участка tраб.
В начале этого участка ток продолжает
увеличиваться. В точке В
рост
тока прекращается, значение его
определяется отношением напряжения на
обмотке U
к
активному сопротивлению обмотки R.
Это
установившийся ток
![]() .
УчастокАВ
необходим
для того, чтобы обеспечить надежное
притяжение якоря к сердечнику, исключающее
вибрацию якоря при сотрясениях реле.
Отношение установившегося тока к току
срабатывания Iср
называется
коэффициентом запаса реле по срабатыванию
.
УчастокАВ
необходим
для того, чтобы обеспечить надежное
притяжение якоря к сердечнику, исключающее
вибрацию якоря при сотрясениях реле.
Отношение установившегося тока к току
срабатывания Iср
называется
коэффициентом запаса реле по срабатыванию
![]() ;
;![]() В то же время Iуст
должен
быть ограничен по соображениям нагрева.
В то же время Iуст
должен
быть ограничен по соображениям нагрева.
Участок
III
начинается с момента снятия напряжения
с обмотки реле. В точке С начинается
уменьшение тока, и в точке D
якорь
начинает отходить от сердечника
(отпускает). В этой точке ток Iот
не
обеспечивает такую силу притяжения,
которая превышала бы противодействующую
силу пружины. Время отпускания состоит
из времени трогания и времени движения
якоря до размыкания контактов: tот=
tтр
+ tдв.
Отношение тока отпускания к току
срабатывания называется коэффициентом
возврата:
![]() ;
;![]()
На участке IV якорь возвращается в исходное состояние и остается в нем до тех пор, пока не будет снова подано напряжение на обмотку реле.