

2. Конструктивные типы контактов
По форме контактирующих поверхностей все конструкции контактов могут быть подразделены на три основных типа: точечные, линейные и поверхностные. Точечные контакты (рис. 2, а) имеют вид конусов или полусфер, соприкасающихся с плоскостью или полусферой в одной точке. Такие контакты предназначены для переключения малых токов. Линейные контакты (рис. 2, б) имеют вид двух цилиндрических поверхностей, или призмы и плоскости, соприкасающихся по линии. Они предназначены для средних и больших токов. Плоскостные контакты (рис. 2, в) имеют соприкосновение по плоскости и предназначены для больших токов.
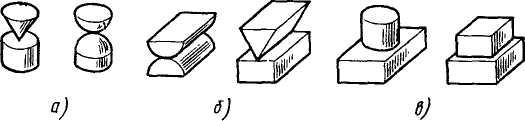
Рис. 2. Основные типы контактов
Контактные узлы включают в себя кроме контактов витые или плоские пружины, обеспечивающие силу прижима между контактами.
На рис. 3 показан рычажный контактный узел, состоящий из двух плоских пружин с неподвижным 1 и подвижным 2 контактами.
Пружины жестко закреплены одним концом в изоляционном основании 3. Перемещение подвижного контакта 2 происходит под действием упора 4. После того как подвижный контакт 2 переместится на величину раствора контактов х0, произойдет замыкание контактов. Обе пружины получат дополнительный прогиб на величину провала контактов хп, поскольку движение упора 4 немного продолжится. За счет этого произойдет проскальзывание контактов (его еще называют притиранием), которое необходимо для удаления пыли и оксидной пленки с поверхности контактов.
На рис. 4 показан мостиковый контактный узел, обеспечивающий разрыв электрической цепи в двух местах, что повышает надежность работы. При перемещении упора 1 мостик с двумя подвижными контактами 3 перемещается в направлении двух неподвижных контактов 4 до соприкосновения контактов. Витая пружина 2 обеспечивает усилие прижима и возможность самоустановки подвижных контактов относительно неподвижных, что компенсирует износ контактов и некоторые неточности при их изготовлении. Полный ход упора 1 состоит из раствора контактов х0 и провала хп (аналогично контактному узлу по рис. 3).
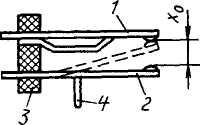

Рис. 3. Рычажный контактный узел
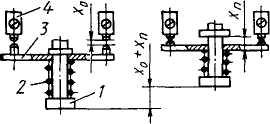
Рис. 4. Мостиковый контактный узел
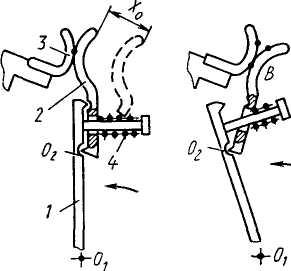
Рис. 5. Рычажный контактный узел с перекатывающимися контактами
На рис. 5 показан рычажный контактный узел с шарнирным закреплением подвижного контакта 2, соприкасающимся с неподвижным контактом 3 по линии. Контактное нажатие осуществляется с помощью пружины 4. Перемещение подвижного контакта происходит при повороте рычага 1 против часовой стрелки относительно оси О1. Сначала подвижный контакт 2 перемещается на величину раствора контакта до соприкосновения с неподвижным контактом 3 в точке А. После этого подвижный контакт совершает сложное движение, поворачиваясь одновременно относительно оси О2 и вместе с рычагом 1 относительно оси О1. В результате подвижный контакт 2 перекатывается по неподвижному 3. В замкнутом положении контактирование происходит в точке В. Перекатывание способствует очищению контактов от окисных пленок, а главное — точка В не подвергается электрической эрозии в момент размыкания контактов.