

1. Назначение. Принцип действия
В автоматических системах очень часто требуется, чтобы элементы, в том числе и электромагнитные реле, реагировали не только на значение, но и на полярность тока на входе. Например, в системе автоматического регулирования температуры при температуре сверх требуемого значения (задания) должен включаться охладитель (например, вентилятор), а при температуре ниже требуемого значения должен включаться нагреватель. Следовательно, реле при одной полярности входного сигнала должно включать одну группу контактов, а при другой полярности — другую. Как известно из электротехники, при пропускании тока по катушке с сердечником создается магнитное поле и на находящиеся в этом поле стальные детали будет действовать сила притяжения. Направление тока или знак индукции магнитного поля не влияют на направление силы. Это всегда сила притяжения, а не отталкивания. В предыдущей главе приведены формулы для электромагнитной силы (12) и (13). В этих формулах значение тока или магнитного потока стоит в квадрате, что и доказывает математически неизменность направления электромагнитной силы при изменении знака тока или потока.
Для получения в электромагнитном механизме знакопеременной зависимости тяговой силы от направления входного сигнала необходимо наличие двух магнитных потоков: создаваемого током в обмотке реле и постоянного, неизменного по величине и направлению, создаваемого обычно постоянным магнитом. Таким образом, при одном направлении тока в обмотке реле магнитные потоки будут складываться, а при другом направлении тока — вычитаться. Следовательно, изменение направления тока приведет к изменению абсолютной величины магнитного потока, чего не было в электромагнитных нейтральных реле.
Чувствительность к направлению (поляризация) осуществляется именно за счет постоянного магнитного потока. Все поляризованные реле основаны на использовании в электромагнитном механизме двух потоков. По конструктивной схеме магнитной цепи различают поляризованные реле, построенные по дифференциальной и мостовой схемам. По числу устойчивых положений якоря различают двухпозиционные и трехпозиционные поляризованные реле.
2. Магнитные цепи поляризованных реле
Поляризованное реле с дифференциальной схемой магнитной цепи показано на рис. 1. Рабочий (управляющий) магнитный поток Фу создается при протекании тока I по обмотке реле, состоящей из двух одинаковых половин 1 и 1’, включенных последовательно и согласно. Постоянный (поляризующий) магнитный поток Фп создается постоянным магнитом 2. Катушки реле 1 и 1’ размещены на неподвижном сердечнике (ярме) 3. Якорь 4 может поворачиваться относительно оси О в рабочем зазоре δ. На якоре размещен подвижный контакт, который может замыкаться с неподвижными контактами 5 или 5'.
Магнитный поток Фу показан пунктиром, а магнитный поток Фп — сплошной линией. Направление потока Фп неизменно, а направление потока Фу зависит от направления тока в катушке реле. На рис. 1 направление потока Фу показано для указанного на этом рисунке направления тока I.
Поляризующий
поток Фл
проходит по якорю 4
и
разветвляется на две части Фп1
и
Фп2
в
соответствии с проводимостями воздушных
зазоров слева (![]() )
и справа (
)
и справа (![]() )
от якоря. В зависимости от полярности
токаI
в обмотке реле рабочий поток Фу
вычитается из потока Фп1
в
зазоре слева от якоря и складывается с
потоком Фп2
в зазоре справа от якоря (как показано
на рис. 1) или наоборот: потоки складываются
в левом зазоре и вычитаются в правом
зазоре при противоположном направлении
тока. На якорь действуют две электромагнитные
силы, направленные встречно, каждая из
которых пропорциональна в соответствии
с уравнением (13) квадрату потока в
соответствующей части зазора. Для
направлений тока и магнитных потоков,
показанных на рис. 1, результирующее
тяговое усилие заставит якорь перекинуться
из левого положения в правое. При
отключении входного сигнала (I
= 0) якорь остается в том положении,
которое он занимал до отключения сигнала.
Реле, показанное на рис. 1, является
двухпозиционным. Результирующее
электромагнитное усилие, действующее
на якорь поляризованного реле, направлено
в сторону того зазора, где управляющий
и поляризующий магнитные потоки
складываются.
)
от якоря. В зависимости от полярности
токаI
в обмотке реле рабочий поток Фу
вычитается из потока Фп1
в
зазоре слева от якоря и складывается с
потоком Фп2
в зазоре справа от якоря (как показано
на рис. 1) или наоборот: потоки складываются
в левом зазоре и вычитаются в правом
зазоре при противоположном направлении
тока. На якорь действуют две электромагнитные
силы, направленные встречно, каждая из
которых пропорциональна в соответствии
с уравнением (13) квадрату потока в
соответствующей части зазора. Для
направлений тока и магнитных потоков,
показанных на рис. 1, результирующее
тяговое усилие заставит якорь перекинуться
из левого положения в правое. При
отключении входного сигнала (I
= 0) якорь остается в том положении,
которое он занимал до отключения сигнала.
Реле, показанное на рис. 1, является
двухпозиционным. Результирующее
электромагнитное усилие, действующее
на якорь поляризованного реле, направлено
в сторону того зазора, где управляющий
и поляризующий магнитные потоки
складываются.
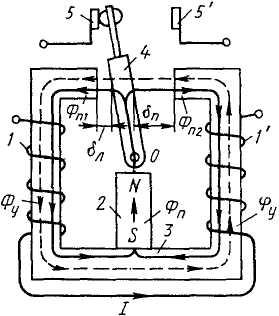
Рис. 1. Поляризованное реле
Рассмотрим
усилия, действующие на якорь поляризованного
реле. Определяются они в соответствии
с уравнением (13). В среднем положении
якоря магнитные проводимости левого и
правого зазора одинаковы и поэтому
поляризующий поток делится на две равные
части:
![]() .
При отсутствии управляющего потока на
якорь будут действовать одинаковые
усилия влево и вправо:
.
При отсутствии управляющего потока на
якорь будут действовать одинаковые
усилия влево и вправо:
![]() (1)
(1)
где
![]() —
площадь сечения воздушного зазора.
—
площадь сечения воздушного зазора.
Результирующая
сила, равная разности
![]() и
и
![]() при
среднем положении якоря, будет равна
нулю. Однако якорь в среднем положении
находится в состоянии неустойчивого
равновесия. Достаточно незначительного
смещения якоря от среднего положения,
чтобы произошло перераспределение
потоков. Уменьшается магнитное
сопротивление того зазора, в какую
сторону сместился якорь. Следовательно,
в ту же сторону увеличится магнитный
поток, а значит, и сила, направленная в
сторону уменьшения зазора. Полагая
сечение воздушного зазора неизменным,
рассмотрим перераспределение поляризующего
потока в зависимости от магнитного
сопротивления, которое будет в этом
случае пропорционально величине зазора.
при
среднем положении якоря, будет равна
нулю. Однако якорь в среднем положении
находится в состоянии неустойчивого
равновесия. Достаточно незначительного
смещения якоря от среднего положения,
чтобы произошло перераспределение
потоков. Уменьшается магнитное
сопротивление того зазора, в какую
сторону сместился якорь. Следовательно,
в ту же сторону увеличится магнитный
поток, а значит, и сила, направленная в
сторону уменьшения зазора. Полагая
сечение воздушного зазора неизменным,
рассмотрим перераспределение поляризующего
потока в зависимости от магнитного
сопротивления, которое будет в этом
случае пропорционально величине зазора.
Отношение магнитных потоков в левом и правом зазоре обратно пропорционально отношению магнитных сопротивлений этих зазоров:
![]() (2)
(2)
Учитывая,
что
![]() ,
а
,
а
![]() (рис. 1), после преобразований получаем
(рис. 1), после преобразований получаем
![]()
![]()
Соответственно электромагнитные силы притяжения якоря, направленные влево и вправо
![]()
![]()
Результирующая сила определяется как разность этих сил:
![]() .
(3)
.
(3)
При
![]() (якорь ближе к левому крайнему положению)
сила тянет якорь влево.
(якорь ближе к левому крайнему положению)
сила тянет якорь влево.
При
![]() (якорь
ближе к правому крайнему положению)
сила тянет якорь вправо.
(якорь
ближе к правому крайнему положению)
сила тянет якорь вправо.
Контактное
давление выключенного реле определяется
силой при
![]()
![]() (4)
(4)
При подаче тока в обмотку поляризованного реле в магнитной цепи возникает магнитный поток Фу, который (для полярности, показанной на рис. 1) складывается в правом зазоре с Фп2 и в левом вычитается из Фп1.
При
достижении Фу
значения, равного Фп,
контактное усилие будет равно нулю. Как
только Фу
станет больше Фу,
якорь перекинется в крайнее правое
положение. Ток, при котором якорь
перебрасывается в новое положение,
называется током срабатывания
![]() .
В новом положении якоря произойдет
перераспределение поляризующего
магнитного потока между зазорами.
Суммарный поток в новом положении якоря
при
.
В новом положении якоря произойдет
перераспределение поляризующего
магнитного потока между зазорами.
Суммарный поток в новом положении якоря
при![]() будет
равен
будет
равен
![]() .
Так как при срабатывании
.
Так как при срабатывании
![]() ,
то
,
то
![]() ,
а усилие, пропорциональное квадрату
магнитного потока, возрастет в четыре
раза по сравнению с усилием в обесточенном
реле. Таким образом, в процессе перемещения
якоря из одного положения в другое
происходит значительное увеличение
тягового усилия. Этим и объясняется то,
что поляризованные реле имеют очень
высокое быстродействие: время срабатывания
составляет несколько миллисекунд. Кроме
того, дополнительное усилие, сжимая
контакты, позволяет при очень малом
управляющем сигнале управлять относительно
мощными электрическими цепями. Однако
главным достоинством поляризованных
реле является их высокая чувствительность.
Чаше всего не стремятся к увеличению
разрывной мощности их контактов,
поскольку это требует увеличения хода
якоря, что приводит к потере чувствительности.
Поэтому высокочувствительные
поляризованные реле выполняются
маломощными с ходом якоря от одного
крайнего положения до другого порядка
0,1—0,2 мм.
,
а усилие, пропорциональное квадрату
магнитного потока, возрастет в четыре
раза по сравнению с усилием в обесточенном
реле. Таким образом, в процессе перемещения
якоря из одного положения в другое
происходит значительное увеличение
тягового усилия. Этим и объясняется то,
что поляризованные реле имеют очень
высокое быстродействие: время срабатывания
составляет несколько миллисекунд. Кроме
того, дополнительное усилие, сжимая
контакты, позволяет при очень малом
управляющем сигнале управлять относительно
мощными электрическими цепями. Однако
главным достоинством поляризованных
реле является их высокая чувствительность.
Чаше всего не стремятся к увеличению
разрывной мощности их контактов,
поскольку это требует увеличения хода
якоря, что приводит к потере чувствительности.
Поэтому высокочувствительные
поляризованные реле выполняются
маломощными с ходом якоря от одного
крайнего положения до другого порядка
0,1—0,2 мм.
 Рис.
2. Поляризованное реле с мостовой
магнитной цепью
Рис.
2. Поляризованное реле с мостовой
магнитной цепью
Работа поляризованного реле с мостовой схемой магнитной цепи (рис. 2) происходит аналогично реле с дифференциальной схемой. Отличие заключается в том, что магнитная цепь для управляющего потока Фу, создаваемого обмоткой реле, выполнена отдельно от магнитной цепи для поляризующего потока Фп, создаваемого постоянным магнитом. Благодаря этому поляризованные реле мостового типа имеют более высокую стабильность параметров и устойчивее к внешним механическим воздействиям.