

4. Индукционные реле
Принцип действия индукционного реле основан на взаимодействии переменных магнитных потоков с токами, индуцированными этими потоками.
Индукционное реле (рис. 3) состоит из двух неподвижных электромагнитов 1 и 2, по обмоткам которых протекают соответственно переменные токи I1 и I2. В воздушном зазоре электромагнитов установлен алюминиевый или медный диск 3, который может поворачиваться относительно оси 4. Переменные магнитные потоки, создаваемые электромагнитами 1 и 2, индуцируют ЭДС в диске 3, под действием которых в диске создаются вихревые токи (так же, как в короткозамкнутом роторе асинхронного двигателя).
Для того чтобы взаимодействие магнитных потоков с вызванными ими же токами привело к созданию вращающего момента, необходимо наличие сдвига по фазе токов I1 и I2. Только в этом случае в зазоре индукционного реле будет создано вращающееся магнитное поле, аналогично тому, как это происходит в двухфазном асинхронном двигателе. При сдвиге фаз между токами I1 и I2 в 90° сила взаимодействия магнитного потока электромагнита 1 с током, индуцированным в диске от потока электромагнита 2, будет всегда совпадать по направлению с силой взаимодействия магнитного потока электромагнита 2 с током, индуцированным в диске от потока электромагнита 1. При совпадении токов I1 и I2 по фазе в среднем за период результирующая сила будет равна нулю.
Вращающий момент, приложенный к диску, определяется так:
![]() (8)
(8)
где
К
—
постоянный коэффициент, зависящий от
конструктивных и обмоточных данных
реле;
![]() —
фазовый сдвиг между I1
и
I2
—
фазовый сдвиг между I1
и
I2
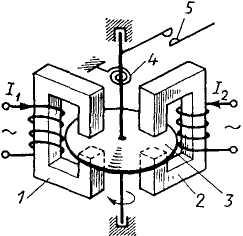 Рис.
3. Индукционное реле
Рис.
3. Индукционное реле
Этот вращающий момент, преодолевая сопротивление пружины 4, поворачивает диск до тех пор, пока не замкнутся контакты 5.
Поскольку индукционное реле реагирует на фазу, его (как и электродинамическое) можно применять в качестве реле фазы. Малая инерция подвижной части позволяет использовать такие реле как быстродействующие в схемах автоматической защиты и блокировки. Особенно они распространены в автоматике на железных дорогах. Они могут использоваться в качестве реле тока, напряжения, мощности, частоты, фазы, сопротивления. Достоинством их является то, что они не требуют подвода тока к подвижной части. Чувствительность индукционных реле невелика, для их срабатывания требуется мощность не менее 0,5 Вт.
Рассмотрим также применение индукционного реле в качестве реле скорости (рис. 4). Входной вал 5 реле связан с механизмом, скорость которого требуется контролировать. На валу 5 установлен цилиндрический постоянный магнит 4. При вращении поле магнита пересекает проводники короткозамкнутой обмотки 3 поворотного статора 6. В обмотке 3 наводится ЭДС, значение которой пропорционально скорости вращения входного вала 5. Под действием этой ЭДС по обмотке 3 проходит ток, сила взаимодействия которого с вращающимся полем магнита 4 стремится повернуть статор 6 в направлении вращения. При определенной скорости вращения сила возрастает настолько, что упор 2, преодолевая противодействие плоской пружины, переключает контакты реле. В зависимости от направления вращения переключается контактный узел 1 или 7. Точность работы индукционного реле скорости невелика. В точных системах контроля скорости необходимо использование более сложной схемы, включающей в себя индукционный датчик скорости и высокочувствительное поляризованное реле.

Рис. 4. Индукционное реле скорости