

5. Дифференциальные измерительные схемы
Дифференциальная схема состоит из двух смежных контуров с источником питания, а измерительный прибор включен в общую ветвь контуров и реагирует на разность контурных токов. В дифференциальной схеме могут быть использованы как параметрические датчики (с изменяющимися сопротивлениями), так и генераторные (с изменяющейся ЭДС). Дифференциальные схемы включения параметрических датчиков показаны на рис. 8 (а — датчик включен в один контур; б — датчик включен в оба контура). ЭДС, питающие оба контура, одинаковы. Дифференциальная схема включения генераторного датчика показана на рис. 9. В этой схеме датчиком является так называемый дифференциальный трансформатор. При изменении магнитной связи между обмотками трансформатора ЭДС левого контура, например, возрастает, а правого — уменьшается. Изменение магнитной связи обусловлено контролируемой неэлектрической величиной. Например, оно может быть вызвано перемещением ферромагнитного сердечника в дифференциальном трансформаторе.
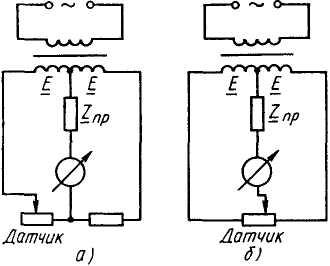 Рис. 8. Дифференциальные
схемы включения параметрических
датчиков.
Рис. 8. Дифференциальные
схемы включения параметрических
датчиков.
Проведем сравнение дифференциальной и мостовой измерительных схем по чувствительности. В обеих схемах (рис. 10, а, б) будем использовать одинаковые датчики с изменяющимся активным сопротивлением R+ ΔR и одинаковое питание — от вторичной обмотки трансформатора с ЭДС, равной 2Е (при дифференциальной схеме имеется вывод от средней точки).
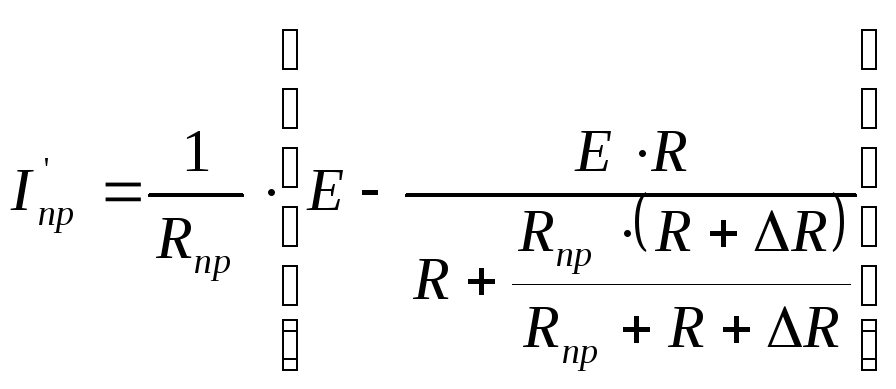
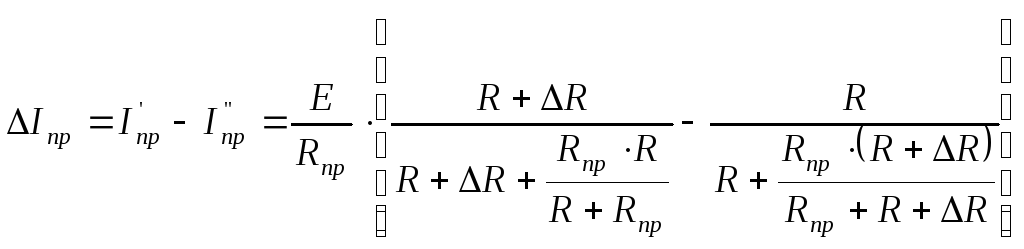
Для расчета токов в дифференциальной схеме используем метод наложения: сначала определим токи от одной ЭДС, затем — от другой (рис. 11).
Ток через прибор для расчетной схемы (рис. 11, а)
Ток через прибор для расчетной схемы (рис. 11, б)
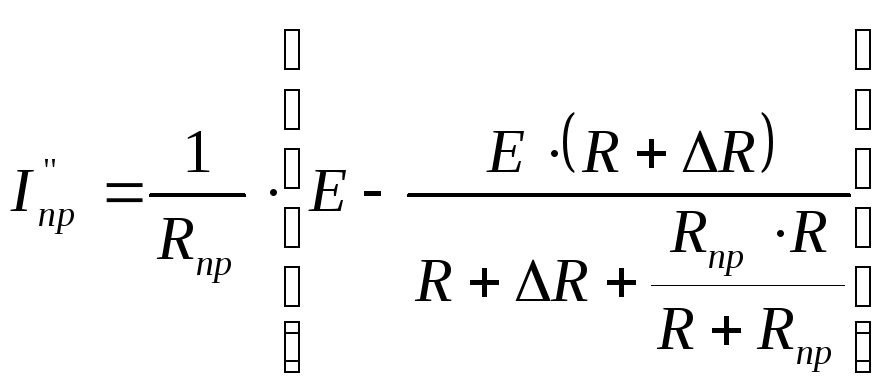
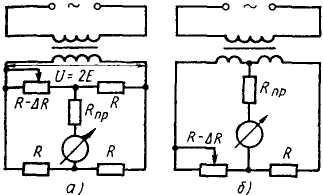
Рис. 10. К расчету мостовой схемы включения датчика
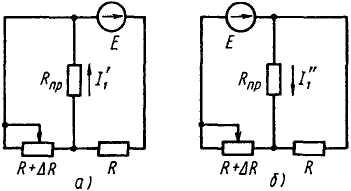
Рис. 11. К расчету дифференциальной схемы включения датчика
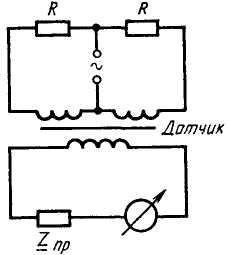
Рис. 9. Дифференциальная схема включения генераторного датчика
Результирующий ток через прибор
Определение чувствительности дифференциальной схемы в общем виде приводит к довольно сложному уравнению, поэтому рассмотрим числовой пример. Пусть Е= 10 В; R= 10 Ом; ΔR = 0,1 Ом;
![]() =
0,5 Ом. Тогда
=
0,5 Ом. Тогда

Приращение тока для мостовой схемы определим по (7):
![]()
Таким образом, при одинаковых напряжениях питания, сопротивлениях датчика и измерительного прибора, приращениях сопротивления датчика дифференциальная схема дает большее приращение тока в измерительной цепи. Следовательно, дифференциальная измерительная схема имеет большую чувствительность, чем мостовая схема.
Ток в измерительной цепи мостовых и дифференциальных схем зависит от напряжения питания. Колебания напряжения питания приводят к появлению погрешности, так как ток через прибор и отклонение его стрелки изменяются даже при неизменном сопротивлении датчика.
Для уменьшения влияния напряжения питания на показания прибора используют так называемые логометрические схемы измерения. Логометром называется магнитоэлектрический прибор, противодействующий момент в котором создается не механически (пружиной), а электрически. На рис. 12 приведена принципиальная схема логометра для измерения сопротивления датчика Rд В магнитном поле постоянного магнита с полюсными наконечниками NS помещен стальной цилиндрический сердечник. В зазоре между сердечником и полюсными наконечниками помещены две обмотки w1 и w2, выполненные в виде рамок. При прохождении тока по рамке создается вращающий момент и рамка поворачивается. Зазор сделан неравномерным, чтобы вращающий момент изменялся в зависимости от угла поворота. Обмотки w1 и w2 намотаны так, чтобы моменты рамок были направлены навстречу друг другу. Рамки жестко соединены между собой под определенным углом. Вместе они могут поворачиваться одновременно с закрепленной на рамках стрелкой прибора. Токи к рамкам поддерживаются с помощью спиральных пружин, которые создают малый противодействующий момент, возвращающий рамки и стрелку в исходное положение, когда тока в приборе нет.
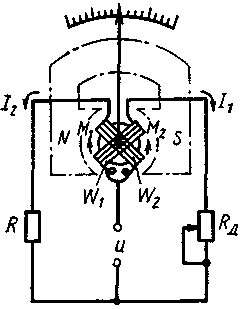 Рис.
1 Логометрическая измерительная схема
Рис.
1 Логометрическая измерительная схема
Датчик Rд включен последовательно с обмоткой w1, постоянный резистор R — последовательно с обмоткой w2. Если сопротивления Rд и R равны, то токи в рамках также равны (I1= I2) и подвижная система (обе рамки со стрелкой) займет положение, симметричное относительно оси полюсов NS. Если же сопротивление датчика изменится (например, увеличится), то ток I1 уменьшится и уменьшится момент M1 создаваемый этим током в рамке w1. Так как ток I2 и соответствующий ему момент M2 остался неизменным, то результирующий момент повернет подвижную систему на некоторый угол. При этом рамка w2 с большим током входит в расширяющийся зазор с меньшей индукцией, а рамка w1 с меньшим током, наоборот, входит в сужающийся зазор с большей индукцией. Момент М2 будет уменьшаться, а M1 — увеличиваться. При определенном угле поворота моменты сравниваются и подвижная система займет новое равновесное положение. Если же изменится напряжение питания цепи U, то в рамках w1 и w2 изменятся токи, притом одновременно и в одинаковой степени (так как рамки подключены к источнику питания параллельно). Соотношение токов и моментов останется неизменным и положение подвижной системы не изменится. Как видно, на положение стрелки влияют не сами токи, а их отношение, которое определяется сопротивлением датчика и не зависит от напряжения питания.