

1. Принцип действия и назначение
Работа ультразвуковых датчиков основана на взаимодействии ультразвуковых колебаний с измеряемой средой. К ультразвуковым относят механические колебания, происходящие с частотой более 20 000 Гц, т. е. выше верхнего предела звуковых колебаний, воспринимаемых человеческим ухом. Распространение ультразвуковых колебаний в твердых, жидких и газообразных средах зависит от свойств среды. Например, скорость распространения этих колебаний для разных газов находится в пределах от 200 до 1300 м/с, для жидкостей — от 1100 до 2000, для твердых материалов — от 1500 до 8000 м/с. Очень сильно выражена зависимость скорости колебаний в газах от давления.
Различны коэффициенты отражения ультразвуковых волн на границе раздела разных сред, различна и звукопоглощательная способность разных сред. Поэтому в ультразвуковых датчиках информация о различных неэлектрических величинах получается благодаря измерению параметров ультразвуковых колебаний: времени их распространения, затухания амплитуды этих колебаний, фазового сдвига этих колебаний.
Ультразвуковые методы измерения относятся к электрическим методам постольку, поскольку возбуждение ультразвуковых колебаний и прием этих колебаний выполняются электрическим способом. Обычно для этого используют пьезоэлементы и магнитострикционные преобразователи. Ранее были рассмотрены пьезоэлектрические датчики, преобразующие давление в электрический сигнал. Это прямой пьезоэффект. Он используется в приемниках ультразвукового излучения. Обратный пьезоэлектрический эффект заключается в сжатии и растяжении пьезокристалла, к которому приложено переменное напряжение. Для возбуждения ультразвуковых колебаний и используется этот эффект. Таким образом, пьезоэлемент может использоваться попеременно то излучателем, то приемником ультразвуковых колебаний.
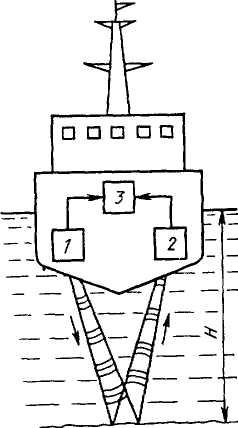 Рис.
1. Эхолот с ультразвуковым датчиком
Рис.
1. Эхолот с ультразвуковым датчиком
Магнитострикционные излучатели ультразвука используют явление деформации ферромагнитов в переменном магнитном поле.
Поясним работу ультразвукового датчика на примере эхолота — прибора для измерения глубины моря (рис. 1). При подаче переменного напряжения на пьезоэлемент 1 возбуждаются ультразвуковые колебания, направленные вертикально вниз. Отраженный ультразвуковой импульс воспринимается пьезоэлементом 2. Электрический прибор 3 измеряет время t между посылаемым и принимаемым импульсами. Глубина моря пропорциональна этому времени и скорости распространения звука v в воде:
![]() (1)
(1)
Шкала прибора градуируется непосредственно в метрах. Аналогично действует ультразвуковой локатор, определяющий расстояние до препятствия на пути корабля в горизонтальном направлении. Некоторые животные (например, летучие мыши и дельфины) имеют органы ориентировки, действующие по принципу ультразвукового локатора.
Ультразвуковые колебания имеют энергию значительно большую, чем звуковые, поскольку энергия пропорциональна квадрату частоты. Кроме того, сравнительно просто осуществляется направленное излучение ультразвука.
С помощью ультразвуковых датчиков обнаруживают дефекты в металлических деталях: трещины в изделиях, полости в отливках и т. д. Ультразвуковые датчики играют важную роль в дефектоскопии, в неразрушаюших методах контроля. Кроме того, ультразвуковые датчики используются в приборах для измерения расхода, уровня, давления.