

2. Принцип действия проволочных тензодатчиков
Принцип работы проволочного тензодатчика основан на изменении активного сопротивления проволоки при ее деформации. Изменение активного сопротивления проволоки происходит по двум причинам: во-первых, изменяются геометрические размеры проволоки (длина l, сечение s); во-вторых, при деформации изменяется удельное сопротивление ρ материала проволоки. А эти величины и определяют активное сопротивление проволоки:
![]() (1)
(1)
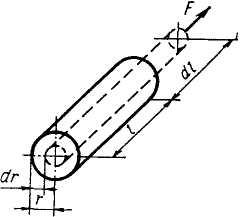
Рассмотрим
(рис. 1) провод длиной l,
радиусом r,
сечением
![]() и объемом
и объемом![]() ,
который при деформации (растяжении) под
влиянием силыF
получает
удлинение dl
и уменьшение радиуса dr.
Следовательно, новый объем проволоки
,
который при деформации (растяжении) под
влиянием силыF
получает
удлинение dl
и уменьшение радиуса dr.
Следовательно, новый объем проволоки
![]() (2)
(2)
Пренебрегая
бесконечно малыми высших порядков [вида
![]() ,
,![]() ],
получим
],
получим
![]()
откуда приращение объема
![]() (3)
(3)
 1.
Деформация провода
1.
Деформация провода
Преобразуем
уравнение (3), помножив и поделив вычитаемое
на
![]() и заменив
и заменив![]() наs:
наs:
![]() (4)
(4)
где
![]() — коэффициент Пуассона, характеризующий
изменение размеров проволоки при
растяжении; для металлов
— коэффициент Пуассона, характеризующий
изменение размеров проволоки при
растяжении; для металлов
![]() .
Если бы материал не изменял объем при
растяжении, то
.
Если бы материал не изменял объем при
растяжении, то
![]() и
и
![]() .
Таким образом, реальные металлы изменяют
свой объем, а следовательно, они
претерпевают и внутриструктурные
изменения: очевидно меняется плотность
материала и его удельное сопротивление.
.
Таким образом, реальные металлы изменяют
свой объем, а следовательно, они
претерпевают и внутриструктурные
изменения: очевидно меняется плотность
материала и его удельное сопротивление.
Для определения изменения сопротивления проволоки при растяжении продифференцируем уравнение (1), полагая, что все входящие в него члены зависят от усилия F.
Напомним формулу для дифференцирования произведения функций
![]()
и для дифференцирования частного функций
![]()
Используя эти правила дифференцирования, записываем
![]() (5) Продифференцируем
также выражение для объема проволоки
(5) Продифференцируем
также выражение для объема проволоки
![]() :
:
![]() (6)
(6)
Сравнивая (6) и (4), получаем
![]() (7)
(7)
Подставляя (7) в (5), имеем
![]() (8)
(8)
Выражение для относительного изменения сопротивления получим, разделив (8) на (1):
![]() (9)
(9)
Чувствительность проволочного тензодатчика определяем как отношение величины относительного изменения сопротивления по (9) к относительному изменению линейного размера:
![]() (10)
(10)
Обозначим третье слагаемое в (10) через коэффициент т, учитывающий изменение удельного сопротивления, связанное с изменением размеров
![]()
Тогда чувствительность
![]() (11)
(11)
Слагаемое
![]() для металлов может иметь максимальное
значение 1,8 (при
для металлов может иметь максимальное
значение 1,8 (при
![]() ).
Но чувствительность для некоторых
сплавов превышает 2. Это как раз и
означает, чтот
>
0, т. е. при деформации изменяется удельное
сопротивление.
).
Но чувствительность для некоторых
сплавов превышает 2. Это как раз и
означает, чтот
>
0, т. е. при деформации изменяется удельное
сопротивление.
В табл. 1 приведены характеристики некоторых сплавов, используемых для проволочных тензодатчиков. Следует иметь в виду, что деформация не является единственной причиной изменения сопротивления тензодатчика. Сопротивление меняется и в зависимости от температуры. Это явление используется в термосопротивлениях. Очевидно, для уменьшения температурной погрешности тензодатчика его материал должен иметь высокую чувствительность Sд при малом температурном коэффициенте расширения и малом значении термоЭДС при контакте с медными соединительными проводами. В табл. 1 приведены пределы изменения характеристик материалов проволочных тензодатчиков, поскольку эти характеристики зависят не только от состава сплава, но и от технологии изготовления.
Тензочувствительность полупроводников во много раз больше тензочувствительности металлов.