

2. Излучатели ультразвуковых колебаний
В ультразвуковых электрических датчиках наибольшее распространение получили магнитострикционные и пьезоэлектрические излучатели, возбуждаемые с помощью полупроводниковых и электронных генераторов, вырабатывающих переменное напряжение с частотой более 10 кГц. Часто применяется и импульсное возбуждение ультразвуковых излучателей.
Магнитострикционный излучатель стержневого типа (рис. 2, а) представляет собой набор тонких листов из ферромагнитного материала, на который намотана обмотка возбуждения. Чаще всего в магнитострикционных излучателях используется никель и его сплавы (инвар и монель), а также ферриты. Форма пластины показана на рис. 2, б.
 Рис.
2. Магнитострикционный излучатель
Рис.
2. Магнитострикционный излучатель
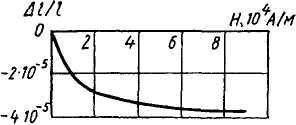 Рис.
3. Зависимость относительного изменения
длины от напряженности магнитного поля
Рис.
3. Зависимость относительного изменения
длины от напряженности магнитного поля
Если
стержень из ферромагнитного материала
находится в переменном магнитном поле,
то он будет попеременно сжиматься и
разжиматься, т. е. деформироваться.
Зависимость относительного изменения
длины
![]() стержня из никеля от напряженности
магнитного поляH
показана на рис. .3. Так как знак деформации
не зависит от направления поля, то
частота колебании деформации будет в
два раза больше частоты переменного
возбуждающего поля. Для получения
больших механических деформаций
используют постоянное подмагничивание
стержня, чтобы работать на наиболее
крутом участке кривой (рис. 3).
стержня из никеля от напряженности
магнитного поляH
показана на рис. .3. Так как знак деформации
не зависит от направления поля, то
частота колебании деформации будет в
два раза больше частоты переменного
возбуждающего поля. Для получения
больших механических деформаций
используют постоянное подмагничивание
стержня, чтобы работать на наиболее
крутом участке кривой (рис. 3).
Магнитострикционные излучатели работают в условиях резонанса, когда частота возбуждающего поля совпадает (настроена в резонанс) с частотой собственных упругих колебании стержня, которая определяется по формуле
![]() (2)
(2)
где l — длина стержня; Е — модуль упругости; ρ — плотность материала.
Для никелевого стержня длиной l = 100 мм частота собственных колебаний составляет 24,3 кГц, амплитуда достигает примерно 1 мкм. Наивысшая частота, на которой еще удается возбудить достаточно интенсивные колебания, составляет 60 кГц, что соответствует длине 40 мм. Помимо основной частоты в стержне можно возбудить и колебания на высших гармониках (при соответствующем креплении стержня), но с меньшей амплитудой.
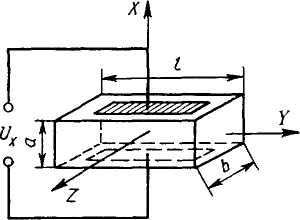
В пьезоэлектрическом излучателе ультразвуковых колебаний используется пластина кварца (рис. 4), к которой приложено переменное напряжение Ux, создающее электрическое поле в направлении электрической оси X (см. рис. 1). Продольный обратный пьезоэффект заключается в деформации пластины по оси X.
При этом относительное изменение толщины пластины
![]() (3)
(3)
 Рис
4. Пьезоэлектрический излучатель
ультразвуковых колебаний
Рис
4. Пьезоэлектрический излучатель
ультразвуковых колебаний
Поперечный обратный пьезоэффект заключается в деформации пластины в направлении механической оси Y. При этом относительное изменение длины пластины
![]() (4)
(4)
Как видно из (3), продольная деформация не зависит от размеров пластины, а поперечная деформация, как следует из (4), увеличивается с ростом отношения l/а. При напряжениях до 2,5 кВ сохраняется прямая пропорциональность между величиной деформации и напряжением. При больших напряжениях деформация увеличивается не столь быстро и при Ux=25 кВ оказывается на 30 % меньшей, чем рассчитанная по (3) и (4). Амплитуда колебаний достигает максимума при равенстве частоты приложенного напряжения и частоты собственных колебаний пластины.
Частота собственных продольных колебаний определяется по формуле, аналогичной (4), где модуль упругости берется в направлении оси X:
![]() (5)
(5)
Частота собственных поперечных колебаний зависит от модуля упругости в направлении оси Y:
![]() (6)
(6)
Для
кварцевых пластин ![]() [кГц] и
[кГц] и ![]() [кГц], где размеры пластины выражены в
сантиметрах.
[кГц], где размеры пластины выражены в
сантиметрах.
По сравнению с магнитострикционными пьезоэлектрические излучатели обеспечивают значительно большую (на 1—2 порядка) частоту ультразвуковых колебаний.