

Общее заключение
Необходимо констатировать, что:
большинство задач распределенных систем автоматизации под силу практически любому протоколу соответствующего уровня;
все серьезные протоколы имеют за плечами поддержку в виде сильных компаний и международных ассоциаций пользователей;
практически все опираются на те или иные стандарты;
заметна тенденция организации шлюзов из одного протокола в другой, например: ASI - PROFIBUS или INTERBUS-S - PROFIBUS;
идет взаимопроникновение одних протоколов в другие, например такие протоколы, как DeviceNet (All en Bradley), SDS (Honeywell) имеют в основе CANbus;
у всех имеется хорошо проработанная аппаратная и программная поддержка и т.д.
Но есть набор критериев, по которым можно сделать осмысленный выбор того или иного протокола:
Информативность: насколько доступны спецификации протоколов и стандарты, на которые опираются эти Протоколы.
Открытость: прежде всего, отсутствие лицензионной платы за использование протокола в своих разработках.
Перспективность: насколько тот или иной протокол представляет собой растущий организм и как он приспосабливается под нужды потребителей. Сегодня заметна тенденция в динамическом развитии семейства протоколов PROFIBUS. К тому же на его основе готовится проект так называемого европейского стандарта промышленной сети, который имеет кодовое название EN50170.
Реальная поддержка в стране. Это, пожалуй, самый важный компонент успеха любого предложения. Есть ли пользователи, а лучше Ассоциация пользователей, у которых можно получить исчерпывающие ответы на вопросы?
Примеры реализации. Всегда хочется посмотреть своими глазами на то, о чем много говорят. Кроме того, это важный аргумент при принятии решений.
Принципы построения увк
На протяжении 20 — 25 лет, начиная с 1960-х гг., в качестве основы УВК использовались малые, или мини-ЭВМ. ЭВМ этой категории обладали достаточной производительностью для управления технологическими процессами при существенно меньшей стоимости по сравнению с большими универсальными ЭВМ. Появление микропроцессоров и микроЭВМ привело к существенному расширению сферы применения УВК. Чтобы выполнять функции УВК, базовая ЭВМ дополняется специальными техническими и программными средствами.

Рис. 1. Структурная схема УВК
Управляющий вычислительный комплекс имеет два принципиальных отличия от универсальных ЭВМ. Во-первых, он через датчики и регулирующие органы осуществляет непосредственную связь с объектом управления. Во-вторых, УВК должен своевременно откликаться на события, происходящие в объекте управления, с которым он взаимодействует, работать в одном темпе с объектом управления, т.е. в реальном времени. Реальное время — понятие относительное и зависит от темпа протекающих процессов.
Упрощенная структурная схема УВК показана на рис. 1.
Комплекс взаимодействует с внешней средой через устройства связи с объектом (УСО) — устройства аналогового и цифрового ввода и вывода. Физические величины, отображающие протекание технологического процесса (например, его температура), носят преимущественно аналоговый характер. Аналоговый сигнал для передачи в ЭВМ должен быть преобразован в цифровую форму. Преобразование аналоговых величин в цифровые осуществляется устройством аналогового ввода.
Обобщенная структура устройства аналогового ввода представлена на рис. 2. Физическая величина преобразуется датчиком в электрическую. Датчиками с электрическим выходом являются, например, термопары и термосопротивления, измеряющие температуру. Цифровое представление аналогового сигнала обеспечивают аналого-цифровые преобразователи (АЦП). Поскольку уровни сигналов датчиков, как правило, не соответствуют требованиям преобразователя, устройства аналогового ввода дополняются обычно средствами нормирования сигнала, в качестве которых используются аттенюаторы, фильтры и т.д. Для поочередного подключения входных сигналов к АЦП используется мультиплексор.
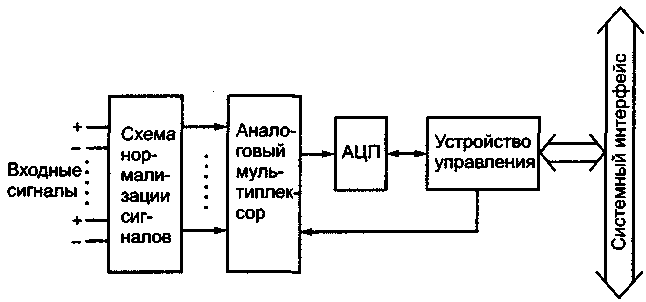
Рис. 2. Структурная схема устройства аналогового ввода
Исполнительные устройства, управляющие технологическим процессом, являются, как правило, аналоговыми. Сопряжение между УВК и аналоговыми исполнительными устройствами осуществляется устройствами аналогового вывода (рис. 3). Аналоговое представление сигнала обеспечивается цифроаналоговыми преобразователями (ЦАП), вырабатывающими аналоговый сигнал, пропорциональный цифровому значению, поступившему от ЭВМ. Устройство управления обеспечивает связь с центральным процессором (ЦП) и передачу данных в ЦАП. Выходной величиной ЦАП является аналоговый сигнал напряжения или тока, пропорциональный входному цифровому сигналу. Выходной сигнал приводится к виду, требуемому для управления исполнительными устройствами.
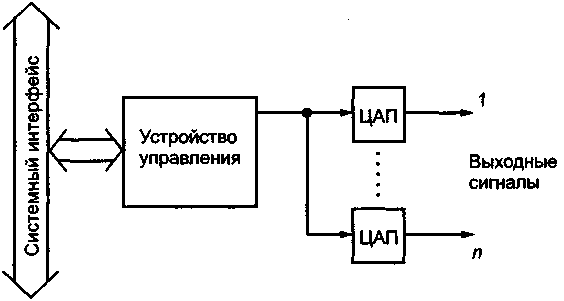
Рис. 3. Структурная схема устройства аналогового вывода
Информация о технологическом процессе может быть представлена не только аналоговыми сигналами, но также сигналами, принимающими дискретные значения. В некоторых технологических процессах используются датчики импульсов. Электрический импульс, регистрируемый счетчиком, может указывать на какое-либо событие или являться известной мерой какой-либо величины. Может также использоваться дискретный сигнал, соответствующий состоянию контактов «включено-выключено» (состояние двигателя, реле и т.д.) или «в пределах - вне пределов», отражаемому разрядом входного регистра.
Основная функция устройства дискретного ввода (рис. 4) — регистрация или подсчет двоичных сигналов, возникающих в технологическом процессе. Схемы нормализации сигнала преобразуют входные сигналы, представленные в виде тока или положения переключателя, в сигналы напряжения и содержат помехозащитную пороговую схему, выходное напряжение которой соответствует логической единице, если входное напряжение превышает некоторый порог. Устройство управления обеспечивает связь с ЦП и формирование внутренних управляющих сигналов. В ряде случаев управление технологическим процессом требует наличия как аналоговых, так и цифровых выходов. Некоторые исполнительные механизмы, например шаговый двигатель, управляются не аналоговой электрической величиной, а электрическими импульсами. При этом устройство вывода вырабатывает последовательность управляющих электрических импульсов, количество и параметры которых задаются программой в УВК.

Рис. 4. Структурная схема устройства дискретного ввода
Обобщенная структура устройства вывода дискретных сигналов представлена на рис. 5. Основная функция таких устройств — функция ключа, управляющего источником напряжения или тока. Это может быть полупроводниковый ключ для коммутации нагрузки малой мощности с высокой скоростью или релейный ключ для коммутации мощной нагрузки при относительно малых скоростях переключения. Длительность замыкания ключа и число импульсов могут программироваться. Каждый бит выходного регистра может использоваться независимо для управления каким-либо технологическим оборудованием.
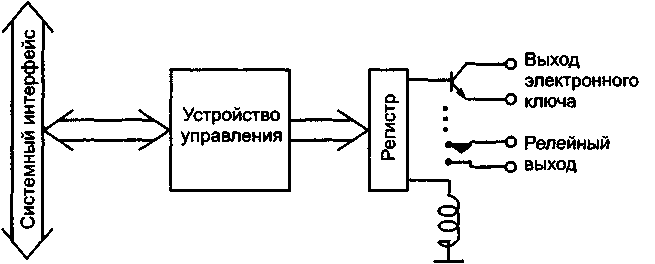
Рис. 5. Структурная схема устройства дискретного вывода
Управляющий вычислительный комплекс должен быстро реагировать на события, происходящие в управляемом технологическом процессе. Момент появления этих событий заранее неизвестен; он не может быть предусмотрен ни оператором, ни программистом, описывающим алгоритм управления. Возможность реакции на внешние события обеспечивается системой прерывания. Датчики, регистрирующие события на объекте, передают информацию в модули УСО, которые посылают в УВК запрос на прерывание. При поступлении сигналов, оповещающих о необходимости реакции УВК на события в управляемом процессе, УВК прерывает работу текущей программы и переходит к выполнению программы, предназначенной для обработки данного события. После выдачи необходимого воздействия на объект управления УВК возобновляет выполнение прерванной программы/Наличие системы прерываний — важная архитектурная особенность УВК.
Работа в реальном времени предполагает использование времени как параметра управления процессом. Управляющие воздействия должны быть выданы через определенное время после появления каких-либо событий в технологическом процессе. Для реализации функций, связанных с отсчетом времени, используются или программируемый таймер, или «часы реального времени», показания которых определяют моменты времени для выполнения управляющих воздействий.
На рис. 6 приведена структурная схема включения УВК в замкнутый контур управления технологическим процессом. Управление осуществляется на основе математической модели технологического процесса, которая разрабатывается в результате всестороннего изучения поведения процесса и его реакции на управляющие воздействия. Модель процесса служит основой для разработки алгоритма управления — процедуры расчета управляющих воздействий. Значения сигналов, поступающих от датчиков технологического процесса, являются входами алгоритма управления. В соответствии с этим алгоритмом создается программа, вычисляющая значения управляющих воздействий, которые реализуются исполнительными механизмами.
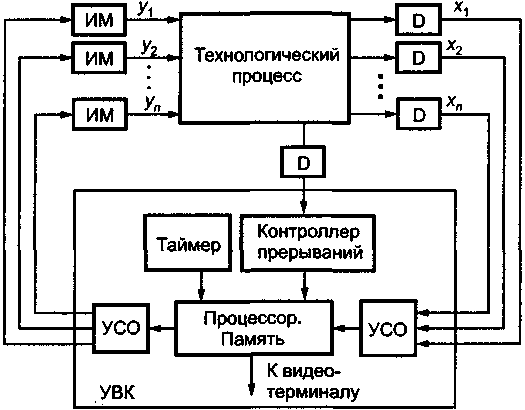
Рис. 6. УВК в контуре управления технологическим процессом: х1,..., х2 — параметры процесса; у1,..., уn — управляющие воздействия; D — датчики; ИМ — исполнительные механизмы
Эксплуатируются УВК в основном в производственных условиях. В этой связи конструктивной особенностью УВК является пылезащитный и сейсмостойкий корпус, защищающий их при работе в неблагоприятных условиях внешней среды от механических ударов и вибраций, повышенной влажности, запыленности и т.д. Характерным для УВК является модульный конструктивный принцип, обеспечивающий удобство обслуживания и ремонта. Эти комплексы имеют намного большее, чем у офисных компьютеров, количество слотов расширения, что позволяет обслуживать большое количество датчиков и исполнительных устройств. В отличие от офисных компьютеров в УВК платы расширения устанавливаются не на системную (материнскую) плату (что непригодно для промышленных условий), а на пассивную объединительную панель, содержащую только слоты расширения. Системная плата — модуль ЦП — так же, как и модули устройств ввода-вывода, вставляется в слот пассивной объединительной панели. Такая компоновка позволяет снизить механические нагрузки на системную плату и существенно повысить надежность УВК.
УВК используют специализированное программное обеспечение — операционные системы реального времени, главная задача которых состоит в быстрой реакции на события, происходящие в управляемом объекте.
К управляющему комплексу предъявляются более жесткие требования по надежности, чем к универсальным ЭВМ, используемым для научно-технических расчетов, поскольку ложное решение, принимаемое машиной, может привести к аварии на управляемом объекте. Надежность можно считать основным критерием качества УВК. Проблема обеспечения надежности УВК требует решения на всех этапах его проектирования и производства. Требования к надежности управляющей вычислительной техники обычно задаются на уровне требований к надежности основного технологического оборудования, для управления которым она используется.
В особо ответственных промышленных АСУТП с режимом эксплуатации, не допускающим перерывов в работе, УВК должны быть отказоустойчивыми, т.е. продолжать работу без снижения производительности в случае, когда в их аппаратных или программных средствах возникают отказы или сбои. Они должны обеспечить безошибочную работу технологического процесса без его остановки или нарушения во избежание возможных технологических и экономических потерь.
Отметим, что поскольку задача управления представляет собой неравномерную нагрузку для УВК, то в интервалы времени, свободные от управления, возможно выполнение других задач, не связанных напрямую с управлением, например инженерных расчетов.
Области применения УВК весьма разнообразны: автоматизация промышленных технологических процессов, автоматизация процессов диагностики в медицине, автоматизация научных экспериментов и т.д.