

3. Электродинамические реле
Принцип действия электродинамического реле основан на взаимодействии двух катушек с током, одна из которых подвижна, а другая неподвижна. От магнитоэлектрического реле электродинамическое реле отличается тем, что индукция в рабочем зазоре создается не постоянным магнитом, а неподвижной катушкой на сердечнике, г. е. электромагнитным способом. От электромагнитного реле электродинамическое реле отличается тем, что тяговое усилие воздействует не на стальной якорь, а на подвижную катушку.
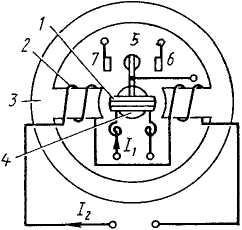
Рис. 2. Электродинамическое реле
Устройство электродинамического реле показано на рис. 2. На магнитопровод 3 надета неподвижная катушка 2, обтекаемая током I2. Между полюсными наконечниками магнитопровода находится цилиндрический стальной сердечник 4. В кольцевом зазоре между полюсными наконечниками и сердечником создается равномерное радиально направленное магнитное поле. В зазоре размещена легкая алюминиевая рамка 1 с обмоткой из тонкого провода, к которой подводится ток I1 по спиральным пружинам, создающим противодействующий момент, стремящийся установить плоскость рамки 1 вдоль оси полюсных наконечников.
При подаче управляющего тока I1 в обмотку рамки 1 она будет поворачиваться в зазоре между полюсными наконечниками и сердечником. Жестко закрепленный на рамке подвижный контакт 5 замыкается с одним из неподвижных контактов 6 и 7.
Сила, действующая на проводники рамки электродинамического реле, так же как и для магнитоэлектрического реле, определяется законом Ампера. Следовательно, будут справедливы уравнения (1) и (2). Однако входящая в эти уравнения индукция В не постоянна, а определяется намагничивающей силой, создаваемой катушкой 2 с током I2:
![]() (4)
(4)
где
Rм
—
магнитное сопротивление на пути
магнитного потока возбуждения;
![]() —
площадь поперечного сечения рабочего
воздушного зазора.
—
площадь поперечного сечения рабочего
воздушного зазора.
Подставляя (4) в (2) и выразив через постоянный коэффициент К сочетание всех неизменных конструктивных и обмоточных данных реле, получим уравнение для вращающего момента электродинамического реле:
![]() (5)
(5)
Из (5) видно, что направление поворота рамки зависит от направления токов в обеих обмотках реле, т. е. оно будет положительным при одинаковых направлениях токов и отрицательным при разных направлениях.
При работе реле на постоянном токе и питании его неизменным по значению и направлению током возбуждения I2 электродинамическое реле (как и магнитоэлектрическое) является поляризованным и трехпозиционным. В зависимость от направления управляющего тока I1 замыкается пара контактов 6—7 или 6—8, а при отсутствии тока I1 контакт 6 находится в среднем, незамкнутом, положении.
Однако в отличие от магнитоэлектрического реле электродинамическое может работать при питании переменным током. В этом случае на рамку воздействует переменный магнитный поток, а направление поворота определяется средним за период значением вращающего момента
![]() (6)
(6)
где
I1
и
I2
действующие значения токов в обмотках;
![]() —
угол сдвига фаз между токами.
—
угол сдвига фаз между токами.
Из
(6) следует, что электродинамическое
реле реагирует на фазу входного сигнала,
т. е. его можно использовать как реле
сдвига фаз, срабатывающее при определенном
значении
![]() .
Это же реле может реагировать и на
мощность переменного или постоянного
тока. В этом случае на одну из обмоток
подается ток, а на другую — напряжение
цепи.
.
Это же реле может реагировать и на
мощность переменного или постоянного
тока. В этом случае на одну из обмоток
подается ток, а на другую — напряжение
цепи.
При последовательном соединении обмоток I1= I2 =I вращающий момент
![]() (7)
(7)
т. е. зависимость тягового усилия от тока будет аналогична электромагнитному нейтральному реле.
К недостаткам электродинамических реле следует отнести их большие габариты и вес.