

Конспект лекций по общей физики (1-4 семестр)
.pdf30
|
d |
2 |
x |
F |
|
|
|
|
|
|
|
||
m |
|
|
2 |
|
, |
|
|
dt |
x |
|
|||
|
|
|
|
|
||
d |
|
y |
|
|
|
|
|
2 |
F |
|
|
||
|
|
|
|
|
||
m |
|
|
|
|
, |
|
|
dt |
2 |
|
y |
|
|
|
|
|
||||
|
|
|
|
|||
d |
|
z |
|
|
|
|
|
2 |
F . |
||||
|
|
|
||||
m |
|
|
2 |
|||
|
dt |
z |
|
|||
|
|
|
|
|
||
1.4.4. Центр масс механической системы
Внешние силы – силы, описывающие действие объектов, не входящих в данную
механическую систему, на тела, входящие в неё. Будем обозначать такие силы |
F |
e |
|
||
13. |
|
|
Внутренние силы – силы, описывающие взаимодействие тел, входящих в данную
механическую систему (обозначение F |
i |
). |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|||||
Для любой механической системы из III закона Ньютона следует, что сумма внут- |
||||||||||||||
ренних сил равна нулю: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
F |
i |
0 |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
||||||
Рассмотрим механическую систему из N материальных точек. |
|
|
|
|
||||||||||
m1 |
|
|
|
|
|
Центр масс механической системы – |
||||||||
|
|
|
|
|
точка, |
для которой |
|
|
|
|
||||
C |
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
N |
m ρ 0 |
|
N |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
или |
m r r |
0 |
, |
||
|
|
|
|
|
|
|
|
i i |
i i |
C |
|
|||
mi |
|
|
|
|
i 1 |
|
|
i 1 |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
||||
m2 |
|
|
|
|
|
где mi |
– масса i-ой материальной точ- |
|||||||
|
mN |
|
|
|
ки, ρ |
– радиус-вектор, соединяющий |
||||||||
|
|
|
|
|
|
i |
|
|
|
|
|
|
||
|
|
|
|
|
|
центр масс с i-ой материальной точ- |
||||||||
|
|
|
|
|
|
кой, ri |
– радиус-вектор i-ой матери- |
|||||||
O |
|
|
|
|
|
альной точки, rC – радиус-вектор цен- |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 3.4 |
тра масс. (На РИС. 3.4 точка C – центр |
|
масс, O – начало отсчёта.) |
||
|
Как найти положение центра масс системы? Из определения центра масс следует
N
где M mi
i 1
|
|
|
|
|
|
|
|
N |
|
N |
|
N |
|
|
|
|
|
m r |
|
|
r r |
|
i i |
, |
|||||
m r |
|
m |
|
i 1 |
|||||
i i |
|
|
i |
C |
C |
|
M |
|
|
i 1 |
i 1 |
|
|
|
|
|
|
||
|
|
|
|
|
|
||||
– масса механической системы. В декартовой системе координат
|
|
|
N |
|
|
|
N |
|
|
|
|
N |
|
|
|
|
|
|
m x |
i |
|
|
m y |
i |
|
|
|
m z |
i |
|
|
|
|
|
i |
|
|
i |
|
|
|
i |
|
||||
x |
|
i 1 |
|
, y |
|
i 1 |
|
, z |
|
|
i 1 |
|
. |
(3.1) |
|
C |
|
C |
|
C |
|
|
|||||||||
|
|
M |
|
|
M |
|
|
|
M |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
13 В «живой» лекции лучше использовать обозначения русскими буквами: Fвнеш и т. п.

31
Если тело (механическая система) центральносимметрично, то его центр масс совпадает с центром симметрии. Если же тело осесимметрично, то центр масс лежит на оси симметрии.
ПРИМЕР
Нахождение центра масс системы двух материальных точек
Две материальные точки массами m1 и m2 находятся на расстоянии l друг от друга (РИС. 3.5). Где находится центр масс системы?
m1 |
C |
m2 |
|
|
O 
xС |
l |
Рис. 3.5
та с материальной точкой массы формулы (3.1) получим
x |
C |
|
|
|
Центр масс C системы, очевидно, должен находиться на прямой между материаль-
xными точками. Радиусы-векторы, соединяющие центр масс и материальные точки, показаны на РИС. 3.5. Введём ось x, как пока-
зано на рисунке, и совместим начало отсчё- m1; тогда координата точки массой m2 равна l. Из
m x |
m x |
|
|
m l |
|
. |
|
1 |
1 |
2 |
2 |
2 |
|
||
|
|
|
|||||
m m |
|
|
m m |
|
|||
|
1 |
2 |
|
|
1 |
2 |
|
Теорема о движении центра масс: центр масс механической системы движется как материальная точка с массой, равной массе системы, к которой приложена сила, равная равнодействующей внешних сил, приложенных к системе,
MaC Fe .
Доказательство
Рассмотрим механическую систему, состоящую из N материальных точек. Дифференциальное уравнение движения i-ой точки
m |
d2r |
F |
e |
|
N |
i |
|
|
i |
|
|
F ki |
|||
|
|
|
|
|
|
||
i |
dt |
2 |
i |
|
|
|
|
|
|
|
|
|
k 1, k i |
|
|
|
|
|
|
|
|
|
|
,
(3.2)
где |
Fi |
e |
– равнодействующая внешних сил, приложенных к i-ой точке; |
|
ренняя сила, с которой k-я точка действует на i-ую точку. Просуммируем равенства (3.2) по всем N точкам системы:
N |
2 |
|
N |
|
|
N N |
F ki . |
m d |
ri F |
e |
|
||||
|
|
|
|
|
|
i |
|
i 1 |
i dt2 |
i 1 |
i |
|
i 1 k 1, k i |
0 |
|
|
|
|
|
|
|
|
|
i F ki
–внут-
(3.3)
Второе слагаемое в правой части этого равенства равно нулю, так как оно равно сумме всех внутренних сил, описывающих взаимодействие тел, входящих в рас-
сматриваемую систему. Первое слагаемое есть главный вектор внешних сил Преобразуем левую часть равенства (3.3), учитывая, что ri rC ρi (РИС. 3.4):
N |
|
2 |
rC |
|
N |
|
2 |
|
|
||
m |
d |
m d |
ρi |
Fe , |
|||||||
|
|
|
|||||||||
i 1 |
i dt2 |
|
i 1 |
i |
dt2 |
|
|||||
2 |
rC |
N |
|
|
d |
2 |
N |
|
|
|
|
d |
m |
|
m ρ Fe . |
||||||||
|
|
|
|
||||||||
dt2 |
i 1 |
i |
|
dt2 |
i 1 |
|
i i |
|
|||
F |
e |
|
.

32
|
2 |
r |
|
|
Но |
d |
|
||
|
|
C |
||
|
|
|
|
|
|
dt |
2 |
|
|
|
|
|
||
как точка
aC
C
N
–ускорение центра масс, mi
i1
–центр масс системы. Поэтому MaCM
– масса системы, а
F |
e |
, ч. т. д. |
|
N mi ρi
i 1
0
, так
1.4.5. Некоторые силы14
1. Гравитационная сила
Сила, описывающая гравитационное воздействие материальной точки15 массой m1 на материальную точку массы m2, находящуюся на расстоянии r от точки мас-
сой m1 (РИС. 3.6):
|
F12 |
G |
m m |
r12 |
|
|
|
|
1 |
2 |
|
|
|||
|
|
|
|
|
|
||
|
|
|
r |
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
– закон всемирного тяготения; G 6,67 |
10 |
11 Н м |
|||||
|
кг |
2 |
|||||
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
янная. Знак «–» означает, что тела притягиваются.
(3.4)
– гравитационная посто-
|
|
O |
R |
|
|
|
|
|
M |
|
m |
m1 |
|
|
|
m2 |
|
|
|
Рис. 3.6 |
|
Рис. 3.7 |
|
ЧАСТНЫЙ СЛУЧАЙ
Сила тяжести – гравитационная сила вблизи поверхности Земли
F mg |
. |
т |
Действительно, пусть материальная точка массы m находится вблизи поверхности Земли, т. е. на расстоянии от центра Земли, равном радиусу R Земли (РИС. 3.7). По закону всемирного тяготения (3.4)
|
|
|
|
|
|
F |
F |
G mM r |
, |
|||
|
|
|
|
|
|
g |
т |
|
|
|
R3 |
|
здесь M – масса Земли. Модуль этой силы |
|
|
|
|||||||||
|
|
|
|
|
|
F G |
M |
m |
mg , |
|
||
|
|
|
|
|
|
|
2 |
|
||||
|
|
|
|
|
|
т |
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где |
g G |
M |
9,81 |
м |
16 |
– ускорение свободного падения (вернее, модуль этого |
||||||
R2 |
|
|||||||||||
|
|
|
с2 |
|
|
|
|
|
|
|
||
ускорения). По II закону Ньютона
14В данном разделе рассматриваются силы, фигурирующие в задачах I семестра.
15В этом определении можно заменить слова «материальная точка» на «тело» с поправкой, что r – это расстояние между центрами масс тел.
16При необходимости проведения вычислений с достаточно высокой точностью следует учиты-
вать, что ускорение свободного падения зависит от географической широты. На широте
Москвы g = 9,8156 м/с2.

33
вектор
g
ma mg,
направлен к центру Земли. Центры масс всех тел, падающих свободно
(т. е. без каких-либо внешних воздействий, кроме гравитационного) вблизи по-
верхности Земли, движутся с ускорением
2. Сила упругости
g
.
Упругая деформация – деформация тела, которая полностью исчезает после прекращения взаимодействия, являющегося её причиной. Воздействие деформированного тела на тело, вызвавшее деформацию, описывается силой упругости.
Закон Гука (в случае линейной деформации):
Fупр k l ,
где l – вектор деформации (РИС. 3.8А), k – коэффициент упругости (жёст-
кость) деформируемого тела. Знак «–» означает, что деформированное тело сопротивляется деформации – пытается восстановить форму.
На РИС. 3.8 представлены разные типы деформируемых тел: А) пружина, Б) нить
(сила натяжения
T
) и В) опорная поверхность (сила реакции опоры
N
).
k |
m |
|
|
|
|
|
|
0 |
|
m |
m |
|
|
|
|
а |
б |
|
в |
Рис. 3.8
(На РИС. 3.8 m – масса груза, 0 – положение недеформированной пружины.)
Сила реакции опоры всегда направлена перпендикулярно опорной поверхности от неё, а сила натяжения – вдоль натянутой нити от натягивающего её тела.
Вес тела – сила, описывающая действие тела на опору или подвес; по модулю ра-
вен силе упругости (по III закону Ньютона
P T
или
P
N
).
Природа упругости – в межмолекулярном, т. е. электромагнитном взаимодействии (см. РАЗДЕЛ 0.3), однако, при изучении механики это для нас не имеет значения.
Демонстрация: Динамометры
3. Сила сухого трения
Сила трения – составляющая силы взаимодействия соприкасающихся тел, параллельная поверхности их контакта (РИС. 3.9А). Наличие этой составляющей обу-
словлено неупругими деформациями тел.
Мы рассматриваем сухое трение, т. е. обе соприкасающиеся поверхности являются твёрдыми (в смысле агрегатного состояния; вязкое трение рассматривается в
РАЗДЕЛЕ 2.9.2).
Закон сухого трения (закон Кулона):

34
F |
μN |
тр max |
|
,
– максимальное значение модуля силы трения – сила трения скольжения, N – модуль силы реакции опоры, µ – коэффициент трения – безразмерная величина, зависящая от материала и состояния соприкасающихся поверхностей. Направлена же сила трения скольжения всегда против скорости тела относительно опорной поверхности.
|
|
|
|
|
Fтр |
|
|
|
|
|
|
|
|
µN |
|
|
|
|
|
m |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
µN |
|
F |
||
|
|
|
а |
б |
|
|
||
|
|
|
|
|
Рис. 3.9 |
|
|
|
График зависимости модуля силы трения от модуля силы |
F |
представлен на |
||||||
РИС. 3.9Б. До тех пор пока F < µN, тело покоится относительно опорной поверхности, а F = Fтр (наклонный участок на графике). При F ≥ µN тело начинает скользить
и Fтр = Fтр max = µN.
Демонстрация: Сила трения Трение также имеет электромагнитную природу.
1.4.6. Кинематические связи
Кинематическая связь – ограничение, накладываемое на движение тела.
1. Координатная связь
Координатная связь – ограничение, накладываемое на координаты точек и их производные при движении тела.
ПРИМЕР
Тело скользит по горизонтальному рельсу.
Перемещение, скорость и ускорение тела должны быть направлены вдоль рельса (РИС. 3.10):
r xi ; |
y,z 0 ; |
|
v vx i ; |
vy ,vz 0 |
; |
a ax i ; ay ,az 0.
2. Нить
x
Рис. 3.10
При решении многих задач нити полагаются невесомыми и нерастяжимыми.
а) Невесомая нить
Во всех точках нити модуль силы натяжения одинаков:
T const .

35 |
|
|
|
Доказательство |
|
|
|
Рассмотрим участок натянутой нити 1-2 |
|
m = 0 |
|
(РИС. 3.11). По условию невесомости масса этого |
|
||
1 |
2 |
||
участка m = 0. Участки нити, находящиеся по обе |
|||
|
|
стороны от данного участка, действуют на него с |
Рис. 3.11 |
|
силами T1 и T2 . |
||
|
Применим к этому участку нити теорему о движении центра масс:
ma T1 T2 |
T2 T1 |
|
0
б) Нерастяжимая нить
Модуль скорости всех точек нити одинаков: v const .
T1
T2
, ч. т. д
Доказательство |
|
|
Будем отсчитывать координаты точек |
|
|
нити по её длине от некоторой точки |
2 |
|
(например, одного из концов нити). Рас- |
||
|
||
смотрим участок нити 1-2 (РИС. 3.12). Ко- |
|
|
ордината точки 1 равна l1, координата |
|
|
точки 2 соответственно равна l2 По усло- |
1 |
|
вию нерастяжимости длина этого участ- |
||
|
||
ка должна оставаться постоянной: |
|
|
l = l2 – l1 = const. |
|
Модули скоростей точек
v1 |
dl |
, v2 |
|
|
1 |
||||
|
|
|
||
|
dt |
|
|
1 и 2 |
Рис. 3.12 |
|
|
|
|
dl |
; |
|
2 |
|
|
|
|
|
dt |
|
|
v v dl2 |
|
dl1 |
|
d l2 l1 |
0 |
v v , ч. т. д. |
|||
|
|
||||||||
2 |
1 |
dt |
|
dt |
|
dt |
2 |
1 |
|
0
Из этого следует, что равны и тангенциальные ускорения всех точек нити:
aτ2
aτ1
.
1.4.7. План решения задач по динамике17
1.Выбор объекта исследования и его модели: материальная точка, твёрдое тело, механическая система (указать, какие тела в неё входят)
2.Выбор системы отсчёта (в большинстве случаев – лабораторная)
3.Рисунок (или несколько рисунков)
4.Определение воздействующих объектов. Расстановка обозначений на рисунке:
сил, ускорений и т. д.
5.Запись II закона Ньютона (теоремы о движении центра масс) в векторной форме
17 Аналогичный план подходит и для решения задач по динамике вращательного движения, в т. ч. с использованием законов сохранения. Различия – в законе, на котором основано решение задачи. Подробное обсуждение этого плана и обучение решению задач проводится на практических занятиях.
Пример решения задачи по динамике рассматривается на СЛЕДУЮЩЕЙ ЛЕКЦИИ.

36
6.Выбор системы координат (можно вводить разные системы координат для разных тел)
7.Запись закона в проекциях на оси системы координат
8.Подсчёт числа уравнений и числа неизвестных. Запись дополнительных уравнений (другие законы, уравнения связей и т. п.)
9.Решение полученной системы уравнений в общем виде
10.Анализ результата и проверка размерностей18
11.Численный расчёт и оценка его результата
1.4.8. Импульс. Другая форма II закона Ньютона
Преобразуем выражение II закона Ньютона:
ma F |
|
|
|
a |
dv |
|
|
|
dt |
m |
dv |
F |
|
dt |
|||
|
|
,
|
|
|
|
|
d mv |
F |
(3.5) |
|
dt |
||
|
|
|
– II закон Ньютона в дифференциальной форме.
В этом выражении под знаком дифференциала стоит векторная физическая величина, характеризующая инертность и движение тела – импульс материальной
точки
|
|
|
p mv |
; |
|
|
||
|
|
|
|
|
|
|
|
|
|
p |
кг м |
. |
|
||||
|
|
с |
|
|||||
|
|
|
|
|
|
|
||
Из (3.5) получим |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
, |
|
d |
|
mv |
|
Fdt |
|||
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
Fdt – импульс силы. II закон Ньютона можно сформулировать так: изменение импульса тела равно импульсу силы.
По определению, импульс механической системы равен сумме импульсов тел (материальных точек), входящих в эту систему:
P pi .
Импульс механической системы равен произведению массы M системы на скорость vC её центра масс:
P MvC .
Доказательство
Исходя из определения импульса механической системы,
P pi mi vi mi drdti dtd mi ri
18 Рекомендуется контролировать размерности в течение всего решения задачи.

37
(см. РИС. 3.4)19,
vi
– скорость i-ой материальной точки. В обозначениях этого ри-
сунка ri rC ρi |
. Поэтому |
0, т. к. точка C – центр масс |
||||
|
|
|
|
|||
|
P |
d |
mi rC mi ρi mi |
dr |
Mv , ч. т. д. |
|
|
|
C |
||||
|
|
|
|
|
|
|
|
|
dt |
|
|
dt |
|
Преобразуем выражение теоремы о движении центра масс:
Ma Fe M |
dvC |
Fe |
d Mv |
|
Fe |
|
|||||||||
C |
|
, |
|||||||||||||
|
|
|
|
|
|||||||||||
C |
|
|
|
|
|
|
|
dt |
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dP |
Fe |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
dt |
|
|
|
|
|
|
|
Если система замкнута, то |
F |
e |
0 |
и |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dP |
0 |
P const |
|
|
|
||||||
|
|
|
|
dt |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
– закон сохранения импульса механической системы: импульс замкнутой си-
стемы остаётся неизменным с течением времени.
На самом деле закон сохранения импульса не выводится, а следует из свойств пространства-времени (см. РАЗДЕЛ 1.1.2).
Более подробно закон сохранения импульса будет рассмотрен в ПАРАГРАФЕ 1.6.
19 Разумеется, в «живой» лекции этот рисунок нужно сделать заново.

38
Лекция 4
1.5. Динамика вращательного движения твёрдого тела
1.5.1. Момент силы
Момент силы20 – векторная (псевдовекторная) величина, характеризующая взаимодействие тел.
1. Момент силы относительно точки
Момент силы относительно точки:
M rF |
; |
||
|
|
||
|
|||
точка, относительно которой определяется
момент – полюс; |
|
|
|
|
|
|
|
||
M rF sin |
r,F |
|
; |
|
|
M Н м. |
|
|
|
На РИС. 4.1: O – полюс, A – точка приложения
A
O
Рис. 4.1
силы;
r
и
F
лежат в плоскости рисунка,
M
перпендикулярен плоскости рисунка.
2. Момент силы относительно оси
Момент силы относительно оси:
M rF |
k |
, |
(4.1) |
|
|
z |
|
||
|
|
|
||
вектор21 момента силы относительно оси всегда направлен вдоль этой оси; направление определяется по правилу правого винта.
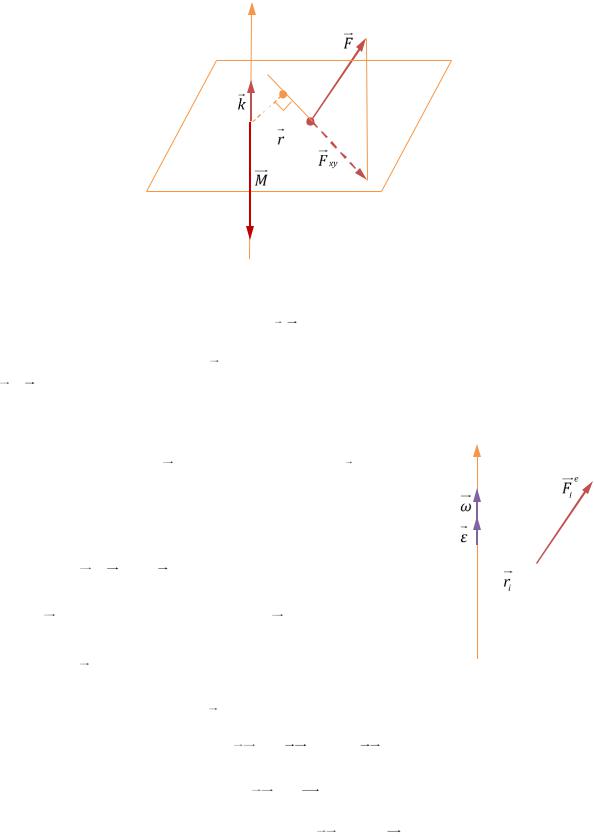
Один из способов определения момента произвольно направленной силы относительно оси показан на РИС. 4.2. На этом рисунке изображено трехмерное твёрдое тело и вектора и линии, лежащие в трехмерном пространстве. Здесь z – ось, отно-
сительно которой рассчитывается момент силы; k – орт этой оси; A – точка при-
ложения силы F ; плоскость xy – плоскость, проведённая через точку A перпендикулярно оси z; O – точка пересечения плоскости xy с осью z, т. е. ближайшая к точ-
ке приложения силы точка на оси; радиус-вектор r восстановлен из точки O в
точку
M rF
приложения |
||||
sin |
|
r,F xy |
|
. |
|
|
|||
силы;
F xy
– проекция вектора силы на плоскость xy;
Можно пользоваться не этим способом, а напрямую определением (4.1). Тогда r – это радиус-вектор, проведённый из любой точки на оси в точку приложения силы.
20Следует обратить внимание студентов на то, что момент силы, а также момент инерции и момент импульса всегда определяется относительно какой-либо точки или оси.
21В большинстве курсов общей физики момент силы, момент импульса относительно оси, а также кинематические величины, характеризующие вращение вокруг неподвижной оси, вводятся как
скалярные алгебраические величины. В нашем же курсе это аксиальные векторы.
39
z
D
h
O  A
A
xy
Рис. 4.2
Плечо силы – это скалярная величина – кратчайшее расстояние от оси до линии
действия силы (отрезок OD = h на РИС. 4.2); |
|
|
||
|
|
|
xy |
|
h r sin |
|
r,F xy |
|
, M hF . |
Если линия действия силы
F
лежит в плоскости, перпендикулярной оси z (т. е.
F
F xy
), то получим соотношение, известное из школьного курса физики: M = hF.
1.5.2. Основное уравнение динамики вращательного движения
Пусть твёрдое тело вращается вокруг неподвижной оси z
(с угловой скоростью ω , угловым ускорением ε ). Разобьём тело на элементарные (малые) фрагменты массами mi (рис. 4.3); расстояние каждого фрагмента от оси вращения равно ri. Запишем II закон Ньютона для i-го фрагмента:
|
e |
i |
|
|
|
mi ai Fi |
Fki . |
|
(4.2) |
|
|
k i |
|
|
Здесь ai |
– ускорение i-го фрагмента; Fi |
e |
– главный вектор |
|
|
||||
внешних сил, с которыми другие тела действуют на i-ый
i фрагмент; F ki – внутренняя сила, описывающая действие
k-го фрагмента на i-ый фрагмент.
z
Oi mi
mi
Рис. 4.3
Умножим равенство (4.2) на
ri mi
слева векторно:
r a r F |
|
|
|
|
r Fki |
||||
|
|
|
|
e |
|
|
|
i |
|
i i |
|
i |
i |
|
|
|
i |
||
|
|
|
|
|
|
|
k i |
|
|
|
|
|
|
|
|
|
|
|
|
.
(4.3)
В правой части этого уравнения |
|
ri Fi |
e |
|
|
|
|||
|
|
|
||
|
|
|
||
|
|
|
|
|
сил, приложенных к i-ому фрагменту;
Mi |
e |
– главный вектор момента внешних |
|||
|
|||||
|
|
i |
|
i |
– сумма моментов внут- |
r Fki |
Mki |
||||
|
i |
|
|
k i |
|
k i |
|
|
|
|
|
ренних сил, приложенных к нему же.