

Раздел 3.2.1. Основы конструирования эс
Более подробная информация содержится в [1 и 2], особенно следует обратить внимания на два аспекта: системность подхода и огромное разнообразие факторов, воздействующих на ЭС, и их диапазоны изменения.
В разделе рассматриваются:1) общая характеристика современных ЭС; 2) основы системного подхода; 3) модели ЭС; 4) обработка статистических данных и проверка статистических гипотез; 5) планирование эксперимента при решении конструкторских задач. После изучения теоретического материала следует ответить на вопросы для самопроверки, приведенные в конце раздела. После изучения материала следует пройти тренировочный тест № 1, в который включены вопросы по разделу 1 и введению.
Общая характеристика современных ЭС. По объекту уста-новки ЭС делятся на три категории: наземную, бортовую (аэрокосмическую) и морскую. Категории делятся на группы (классы).
В пособии [2] приведены наиболее существенные отличия конструкций различных категорий и групп.
Иерархический принцип построения ЭС. Иерархический принцип построения ЭС вытекает из системного подхода. В связи с этим необходимо ввести минимальное число структурных уровней и принцип деления изделий по структурным уровням: нулевой (детали и элементная база), первый (функциональный узел, модуль, ТЭЗ и т.п.), второй (системный блок, дисплей и т.п.),третийхарактеризуется и конструктивной завершенностью, и возможностью самостоятельного применения. На этом уровне изделия могут быть в виде многоблочной или моноблочной конструкции. Более подробно материал представлен в учебном пособии [2].
Условия эксплуатации и дестабилизирующие факторы, влияющие на надежность ЭС, характеристики основных видов воздействий. Отказы происходят вследствие воздействия различных факторов. Факторы возникновения отказов делятся на внешние и внутренние. Внешние факторы – это, прежде всего, воздействия окружающей среды.
Конструктивно-технологические и эксплуатационные требо-вания к конструкциям ЭС рассмотрены в [2]. Особо следует обратить на определения понятий, приведенные в [2]. Кроме этого, в разделе УМК, посвященному методическим указаниям к курсовому проектированию, приведены количественные значения параметров воздействия окружающей среды на ЭС при эксплуатации.
Факторы, влияющие на надежность ЭС, рассмотрены в учебном пособии [2], примерные численные значения дестабилизирующих факторов приведены в табл. 26, с. 122 – 123.
Компоновка ЭС. Компоновка ЭС означает процесс наиболее рационального размещения в пространстве (плоскости) состав-ляющих ее элементов с целью их объединения в завершенную конст-рукцию. Она осуществляется на стадии эскизного проектирования и представляет собой важнейшую задачу конструирования. Основные задачи, решаемые при компоновке – это выбор форм, основных геометрических размеров и массы будущего изделия. Естественно, что перечисленные характеристики ЭС оцениваются при этом прибли-женно, но общее представление о проектируемом изделии полу-чается достаточно полным.
Методы компоновки можно разбить на две группы: анали-тические и модельные. Основой для всех методов является рассмот-рение общих аналитических зависимостей. К аналитическим мето-дам можно отнести численные и номографические. К модельным - графические, аппликационные, модельные и натурные. Более подробно они рассмотрены в [2].
Функционально-узловой метод конструирования [2]. Суть функционально-узлового метода (ФУМ) состоит в том, что разра-батываемая конструкция расчленяется на функционально завер-шенные узлы, которые могут быть отдельно сконструированы, настроены и испытаны до объединения их в готовую конструкцию. Особенности метода анализируются в [2] и это очень важно для понимания модульного метода проектирования, рассмотрение которого будет в дисциплине «Основы конструирования и технологии производства радиоэлектронных средств».
Особенности деления ЭС на приборы. По способу сочлене-ния частей ЭС (системы) можно выделить три компоновочные схе-мы: многоблочная (децентрализованная или разбросанная), пол-ностью централизованная и централизованная с автономными постами управления и антенно-фидерными устройствами. Две последние схемы часто объединяют в одну. Преимущества и недостатки этих компоновочных схем рассмотрены в [2].
Основы системного похода. Физическая и математическая суть системного подхода [13]. На современном этапе развития на-уки и техники ЭС являются уже настолько сложными, что их создание, изучение, управление и оптимизация становятся неэффективными без представления их в виде системы. Под системой будем в дальнейшем понимать упорядоченную совокупность элементов (предметов любой природы), находящихся в отношениях и связях друг с другом, образующих единое функциональное целое, предназ-наченное для решения определенных задач (достижения определенных целей). Часть элементов системы, выполняющих некоторое фу-нкционально завершенное преобразование, называют подсистемой.
Каждая система окружена внешней средой, с которой она взаимодействует. Воздействия среды на систему называют входными воздействиями, воздействия системы на среду – выходными воздействиями. Система может быть формализована, т.е. абстрактно представлена некоторой математической моделью ее функционирования. Модель является упрощенным математическим отображением наиболее существенных свойств реальной системы. Она характеризует правила преобразования входных сигналов х в выходные у.
Исследования объектов с помощью их математических моделей и представляют основную суть системного подхода, характеризующегося следующими важнейшими принципами [2]: целостностью изучаемой системы; структурностью; иерархичностью; множественностью описания; взаимозависимостью системы и среды.
Необходимо обеспечить (и согласовать) принцип входимости математических моделей низких уровней иерархии в более высокие. При этом всякий раз следует стремиться к тому, чтобы математические модели были максимально простыми и удобными для пользователей. Более подробно материал приведен в [2].
Модели ЭС. Моделирование представляет собой метод на-учного познания, при котором исследуемый объект замещается другим, как правило, более простым, называемым моделью, изучение которой дает возможность получить новую и ранее неизвестную информацию об исходном объекте. Различают физическое и математическое моделирование [13]. Процесс создания ЭС всегда включает в себя прогнозирование их основных характеристик.
Математическая модель может быть в общем случае задана системой уравнений, неравенств, логической последовательностью операций и пр. Независимо от способа задания математической модели она всегда дополняется ограничениями, связанными, как правило, с техническими возможностями устройства, условиями его эксплуатации и т.п. Варьируя начальными и граничными условиями, численными значениями коэффициентов в уравнениях и т.п., можно провести изучение физических процессов в изделии. Подобные исследования называют вычислительным экспериментом.
В [2] рассмотрены формальные и физические математичес-кие модели, а также требования, предъявляемые к математическим моделям. Кроме этого, в пособии рассмотрены общие сведения о формальном проектировании ЭС.
Обработка статистических данных и проверка статистических гипотез. Материал приведен в разделе практических занятий, с. 99.
Планирование эксперимента при решении конструкторских задач. Исходные понятия теории планирования эксперимента. С помощью математических методов планирования эксперимента можно получить математическую модель технического процесса в аналитическом виде даже при отсутствии сведений о механизме его протекания. Кроме того, планирование эксперимента может быть применено и для аналитического моделирования в целом производственного процесса. Обычно целью такого моделирования является получение наилучших технико-экономических показателей производства. Математические модели, создаваемые на основе планирования эксперимента, относятся к разряду экспериментально-статистических.
Планирование эксперимента по сути – это использование ма-тематических методов планирования эксперимента с целью получения математической модели технического процесса в аналитическом виде даже при отсутствии сведений о механизме его протекания. Поскольку экспериментально-статистические модели представляют собой математическое описание работы реально существующего объекта, то переменными величинами этих моделей являются [5, 6]:
- с одной стороны, наиболее важные выходные, внутренние и внешние величины, характеризующие протекание технического процесса в объекте,
- с другой стороны, те величины, которые поддаются как измерению, так и управлению (изменению в определенных пределах).
Если объект исследования по техническим, технологическим или экономическим соображениям не допускает преднамеренного варьирования входных переменных в необходимом диапазоне, то для накопления статистического материала применяется пассивный эксперимент, заключающийся в наблюдении и регистрации значений входных и выходных переменных в режиме нормального функционирования исследуемого объекта.
Метод пассивного эксперимента может быть успешным, если при его проведении соблюдаются необходимые условия, к которым относятся такие, как правильное определение времени регистрации данных, обеспечение независимости соседних измерений и входных переменных друг от друга, достаточный с точки зрения математической статистики объем экспериментальных данных.
Выбор структуры модели является наиболее неформализу-емой процедурой, так как исследователь до начала эксперимента, как правило, не располагает необходимой априорной информацией.
Построение модели существенно упрощается, если в качестве ее составляющих используются полиномы, которые следует включать в уравнение регрессии. Модели полиномиального вида имеют преимущество в связи с тем, что с их помощью аналитическая функция может быть описана достаточно точно. Однако при этом нужно иметь в виду, что с увеличением степени полинома весьма существенно возрастает число оцениваемых параметров модели, что влечет за собой увеличение объема эксперимента и затрат на его реализацию [6].
Но прежде чем приступить к проведению эксперимента, не-обходимо выделить наиболее существенные входные величины (факторы) из всей совокупности входных величин, оценить степень корреляции между ними и исключить из числа подлежащих регистрации те из них, которые сильно коррелированы с другими. Выделение наиболее существенных входных переменных производят, например, методом априорного ранжирования [6].
Пусть объект исследования – это конструкция ЭС или технологический процесс. Если он допускает целенаправленное изменение всех наиболее существенных входных переменных (факторов) по заранее составленной программе (матрице планирования) в требуемых диапазонах варьирования, то применяется активный эксперимент. По результатам активного эксперимента, обработанным методами регрессионного анализа при выполнении необходимых его предпосылок, получают, как при пассивном эксперименте, полиномиальную математическую модель.
Прежде всего, различают независимые переменные величины, влияющие на протекающий технический процесс. Эти величины называются факторами. Факторы, как правило, представляют собой измеряемые физические величины, характеризующиеся в различные моменты времени вполне определенными численными значениями. В общем случае в роли факторов могут выступать разнообразные переменные величины или функции от определенных аргументов. Фактор считается заданным, если он выделен из числа других (т.е. назван) и известна область его определения. Обычно факторами являются следующие величины. Внешние воздействия – температура и влажность окружающей среды, ускорение, вибрации и пр. Внутренние условия протекания технического процесса – расход охлаждающего воздуха или жидкости, давление газа внутри блока, температура сушки и др. Некоторые характерные геометрические и физические параметры конструкции и материалов – толщина покрытия, расстояние между платами, процент примеси и пр. Факторы будем обозначать через zr, где r = 1, 2, …, P.
Область определения фактора, т. е. совокупность всех значений, которые принимает данный фактор, может быть непрерывной и дискретной. В задачах планирования активного эксперимента всегда используются дискретные области определения, а для факторов с непрерывной областью определения (температура, время и т. п.) выбираются дискретные множества уровней. Кроме того, фактор должен быть:
- управляемым (поддерживаемым постоянным в течение опыта или меняющимся по заданной программе),
- однозначным (не являющимся функцией других факторов),
- измеряемым с достаточно высокой точностью.
В совокупности факторы должны быть совместимы (их комбинации осуществимы и безопасны), между ними не должно быть линейной корреляции [5].
Планировать эксперимент можно только при управляемых факторах. Это означает, например, что экспериментатор имеет возможность либо поддерживать значения хi на нужном ему постоянном уровне, в течение всего опыта, либо изменять их по специальной программе. В общем случае причин, влияющих на характеристику цели y, может быть множество, и задача экспериментатора состоит, прежде всего, в том, чтобы выбрать среди них только те факторы, влияние которых является определяющим. При таком выборе необходимо руководствоваться следующим: факторы должны быть совместимыми и по возможности независимыми. Совместимость факторов характеризуется возможностью практической реализации любой их комбинации, независимость – отсутствием между ними сильной корреляционной связи.
Первое требование выполняется обычно довольно просто соответствующим отбором факторов [13]. При этом необходимо иметь в виду, чтобы выбранная композиция факторов была бы безопасна в изменяющихся условиях проведения эксперимента. Второе требование выполнить намного труднее, поскольку на практике между хi всегда наблюдается (хотя и слабая) корреляционная связь. Компромиссный вариант, который при этом используется, состоит в том, что при выборе факторов линейная связь между ними считается недопустимой. От удачного выбора факторов зависит успех эксперимента, а выбранное их множество должно быть достаточно полным для характеристики обследуемого объекта [13].
Факторы могут быть количественными и качественными. Количественные факторы представляют собой физические величины, поддающиеся измерению, например уровни напряжений, токов, освещенности, механические перемещения и пр. Качественные факторы – это обычно различные технологические приемы, технические средства осуществления изучаемого процесса, материалы и исполнители. Для количественной оценки их кодируют, т.е. им априорно ставят в соответствие, например, произвольные числа натурального ряда, после чего порядок факторов фиксируется. Факторы должны быть однозначны, т.е. иметь вполне определенное физическое толкование. Различают прямые факторы, которые воздействуют непосредственно на процесс, и косвенные, которые способствуют вполне определенному его протеканию. Правильный учет тех и других факторов очень важен [13].
При планировании эксперимента для каждого фактора выбирают два уровня, на которых они варьируются в эксперименте. Уровень, на котором варьируемый фактор принимает большее значение, называется верхним, уровень, на котором тот же фактор принимает свое меньшее значение, называется нижним. Естественно, что каждый из факторов характеризуется своим верхним и нижним уровнями, которые назначает исследователь. Ровно посредине между верхним и нижним уровнями размещен основной уровень. Разность между верхним уровнем и основным (или между основным и нижним) называют интервалом варьирования.
При выборе интервала варьирования какого-либо фактора имеют место два рода ограничений: ограничение снизу, заключающееся в том, что интервал варьирования не может быть меньшим ошибки измерения уровней фактора, и ограничение сверху, заключающееся в том, что как верхний, так и нижний уровни фактора не должны выходить за область определения фактора. Как правило, при активном эксперименте факторы варьируются на двух уровнях верхнем « + » и нижнем «–». Они отличаются от так называемого базового уровня хбj (j = 1, …, п) на значение шага варьирования ± Δxj. Для упрощения записи условий эксперимента, большей наглядности и удобства последующего анализа полученных результатов масштабы факторов выбираются так, чтобы нижний уровень соответствовал (–)1, основной – нулю, а верхний (+)1.
В качестве базового уровня можно выбирать величину фактора, определенную по технологическому регламенту или из соображений профессионально-логического анализа. Следует иметь в виду, что малый шаг варьирования Δxj может повлечь статистическую незначимость оценки коэффициента уравнения регрессии. В случае, если полученная математическая модель окажется неадекватной, проводится эксперимент с меньшим шагом варьирования, но тогда возникает опасность, что приращение выходной переменной при реализации с меньшим шагом варьирования может не проявляться на фоне шумов. Поэтому целесообразно для уточнения шага варьирования проводить предварительные эксперименты.
Выходные величины, зависимые от факторов, в теории планирования эксперимента называются функциями отклика. Как правило, в качестве функции отклика берется наиболее характерный показатель протекания технического процесса в рассматриваемом объекте. Для конструкции это может быть средняя или максимальная температура перегрева, ускорение вибрации, механическое на-пряжение или массогабаритный, надежность и тому подобный показатель. Для технологического процесса такой величиной являются процент выхода годных изделий, производительность оборудования или другой аналогичный показатель, а для производственного процесса участка, цеха или завода – себестоимость продукции, коэффициент использования оборудования и пр.
Из примеров видно, что функция отклика, по сути дела, является критерием оценки технического процесса и часто может рассматриваться в качестве критерия оптимальности протекания этого процесса. Функцию отклика будем обозначать через H, т.е. в виде общего обозначения критерия оптимальности. Тогда можно записать H = H(z1, …, zp). Геометрический образ, соответствующий функции отклика, называется поверхностью отклика. Для этого рассматривается факторное пространство, т. е. система координат с Р + 1 осями. По Р осям координат откладываются значения факторов, а по (Р + 1)-й оси – значения функции отклика. На рис.2 изображен возможный вид поверхности отклика для Р = 2.
Задача планирования эксперимента состоит в эксперимен-тальном получении математической модели исследуемого технического процесса в некоторой локальной области факторного пространства, лежащей в окрестности выбранной расчетной точки с координатами z̊1, …, z̊p.
В математической теории планирования эксперимента широкое распространение получили полиномиальные модели, представляющие собой алгебраические полиномы, называемые уравнениями регрессии. Последние представляют собой наиболее простой и результативный способ представления формальных математических моделей. Применение полиномиальных моделей особенно эффективно при изучении объектов, зависящих от многих факторов, механизм действия которых неизвестен исследователю.
Приведем в качестве примера уравнения регрессии у, записанные для двух факторов х1 и х2, соответствующие полиномам нулевой, первой и второй степени:

При выборе модели основная задача состоит в том, чтобы подобрать такой полином, который бы с необходимой точностью удовлетворял требованиям математической модели и содержал как можно меньше коэффициентов bi. Минимизация числа коэффициентов уравнения регрессии важна потому, что при прочих равных условиях для определения меньшего числа коэффициентов требуется меньше опытов. Это и составляет основную цель и преимущество активного эксперимента.
Главное требование, предъявляемое к математической модели, это ее способность предвидеть отклики в тех состояниях, где эксперимент не проводился, т.е. предсказывать с требуемой точностью направление дальнейших опытов; в конечном счете – указывать в факторном пространстве последовательность точек, в которых необходимо проводить эксперимент для достижения искомого оптимума с минимальным числом опытов.
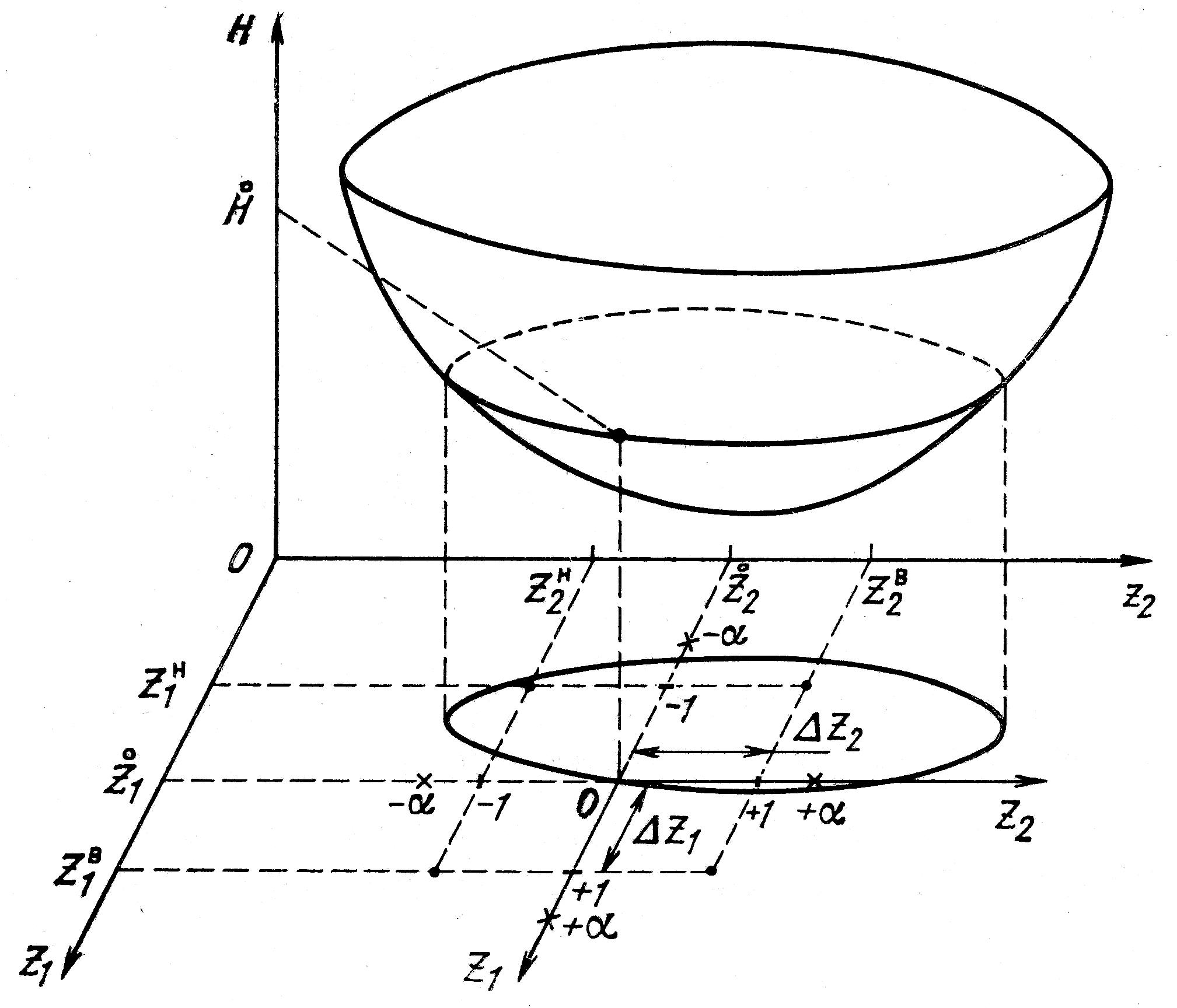
Рис.2. Поверхность отклика при двухфакторном эксперименте
При этом модель должна гарантировать одинаковую точность предсказания при движении в факторном пространстве во всех возможных направлениях к оптимуму (поскольку мы заранее не знаем наилучшего направления этого движения).
Направление движения в факторном пространстве, приводя-щее к наискорейшему улучшению целевой функции (вплоть до достижения ее оптимума), называется направлением градиента. Полином нулевой степени задать это направление не может, поскольку он вообще не зависит от каких-либо факторов. Линейная модель, описываемая полиномом первой степени, уже может задать такое направление. Она содержит минимальное число коэффициентов bi и является в этом смысле простейшей. Чтобы использовать линейную модель для поиска оптимума целевой функции на поверхности отк-лика, надо проверить ее адекватность.
Любую функцию, если она не имеет бесконечных разрывов, можно разложить в степенной ряд Тейлора. Неизвестную функциональную зависимость (функцию отклика) представим в таком же виде

При планировании эксперимента задаются нижним zrн и верхним zrв уровнями варьирования каждого фактора (рис. 2), причем нижний и верхний интервалы варьирования по каждому фактору равны между собой по абсолютной величине:
 .
(1)
.
(1)
Тогда любое отклонение фактора от расчетного значения z̊r, которое называется основным уровнем фактора, можно выразить в относительных единицах zr от интервала варьирования следующим образом:
zr – z̊r = ZrΔzr .
Значения Zr называют иногда кодированным значением фактора. Введение кодированных значений соответствует переносу начала координат фазового пространства в точку рисунка z̊1,…, z̊p (рис.2). Подставив ZrΔzr в формулу для Н, получаем уравнение регрессии
 ,
(2)
,
(2)
где β0 = H(Z1 = 0, …, Zp = 0) = H̊ – расчетное значение функции отклика или свободный член регрессии;

– коэффициенты регрессии.
Достоинством математической модели конструкции или технологического оборудования в аналитической форме уравнения регрессии (2) является простота вычисления функции отклика в любом заданном сочетании значений рассматриваемых факторов, отражающих условия протекания соответствующих технологических процессов. Причем коэффициенты уравнения регрессии наглядно показывают влияние каждого фактора и их сочетаний на функцию отклика. Наконец, уравнение регрессии удобно использовать в любом методе оптимизации. Недостаток такой аналитической модели (2) связан именно с тем, что она является экспериментально-статис-тической, т.е. получение регрессионного уравнения связано с извест-ной громоздкостью проведения любого эксперимента, с решением ряда специфичных для экспериментов вопросов.
Исследование условий проведения эксперимента. При планировании эксперимента необходимо, прежде всего, выяснить возможность воспроизводимости опытов. Для этого надо провести несколько серий параллельных опытов на рассматриваемой конструкции или на технологическом оборудовании. При этом область изменения факторов должна соответствовать интервалам их варьирования (1). По результатам опытов составляют табл.6.
Таблица 6
Результаты изучения воспроизводимости опытов
|
№ серии опытов |
Результаты параллельных опытов |
Среднее ариф-митическое |
Дисперсия | |||||
|
1-ый |
2-ой |
… |
k-ый |
|
| |||
|
1 |
H11 |
H12 |
… |
H1k |
m⃰ (H1) |
D⃰ (H1) | ||
|
2 |
H21 |
H22 |
… |
H2k |
m⃰ (H2) |
D⃰ (H2) | ||
|
. |
. |
. |
… |
. |
. |
. | ||
|
. |
. |
. |
… |
. |
. |
. | ||
|
. |
. |
. |
… |
. |
. |
. | ||
|
N |
HN1 |
HN2 |
… |
HNk |
m⃰ (HN) |
D⃰ (HN) | ||
В данной таблице вычисляются статистические значения математического ожидания функции отклика m⃰⃰ и ее дисперсия D⃰
 ,
,
 .(3)
.(3)
Воспроизводимость
опытов оценивают по критерию
Кохрена
Gp
[5].
Для этого по данным табл.6 определяется
расчетное значение этого критерия
 ,
(4)
,
(4)
где D*max(Hj) – наибольшее значение статистической дисперсии из числа дисперсий, находящихся в последней колонке табл.6.
Для определения табличного значения GT критерия Кохрена необходимо иметь общее количество N статистических оценок дисперсий, число степеней свободы f = k – 1, связанное с каждой из этих оценок, и задаться доверительной вероятностью P, с которой принимается гипотеза о воспроизводимости опытов. Табличное значение критерия Кохрена GТ определяется по значениям N, f, D*(Hj).
Статистические оценки дисперсий являются однородными, а опыты – воспроизводимыми в том случае, когда выполняется неравенство Gp ≤ GT. Если данное условие воспроизводимости опытов не выполняется, то необходимо устранить нестабильности эксперимента. Часто это связано с необходимостью снижения погрешности измерения. Если воспроизводимости опытов достичь не удается, то работы по планированию эксперимента проводить нельзя.
Полный факторный эксперимент. Эксперимент, в котором реализуются все возможные сочетания уровней факторов, называется полным факторным экспериментом (ПФЭ). Если число факторов х равно n и каждый из них варьируется на двух уровнях, то число опытов N в ПФЭ составляет N = 2n. В этом случае говорят, что имеет место ПФЭ типа 2n. Условия ПФЭ (его план) изображают обычно в виде таблицы, строки которой соответствуют номерам опытов, а столбцы – значениям уровней факторов. Эти таблицы называют матрицами планирования эксперимента. Строки в ней называют векторами-строками, а столбцы – векторами-столбцами.
Например, в табл.7 представлена матрица планирования ПФЭ 22 для двух независимых факторов, где «+1» соответствует верхнему уровню варьирования фактором, а «–1» – нижнему, число опытов N = = 4. Для того чтобы получить план эксперимента для трех факторов х1, х2, х3 к плану ПФЭ 22 добавляют один столбец, в котором фактор х3 варьируется на нижнем уровне («–1»), и повторяют этот план с варьированием фактора х3 на верхнем уровне (« +1 »). Такая же процедура повторяется для числа факторов n = 4 и так далее.
В тех случаях, когда эффект фактора хj зависит от уровня, на котором находится другой фактор xi имеет место взаимодействие двух факторов хij, для оценки которого вводят в матрицу планирования столбец произведений этих факторов. Поскольку изменение выходной переменной носит случайный характер, то эксперимент проводится с т параллельными опытами и определяется среднее значение выходной переменной ŷ по каждой строке матрицы планирования yg (g = 1, …, m).
Таблица 7