

стр.
ФИЗИЧЕСКИЕ ОСНОВЫ МИРОВОЗЗРЕНИЯ, УПП 2 КУРС
Р А З Д Е Л 1. Ф И З И К А К О Л Е Б А Н И Й И В О Л Н
Глава I. Свободные колебания.
§ 1.1. Гармонический осциллятор.
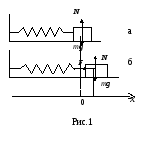 Рассмотрим груз,
закрепленный на упругой пружине. Эта
физическая система называется пружинным
маятником, если груз можно считать
материальной точкой, а пружину - невесомой
и идеально упругой. При деформации
пружины груз движется вдоль оси x,
начало которой (х=0)
совместим с положением равновесия груза
(рис1 - а). Растяжению пружины соответствует
х>0,
сжатию - х<0.
Сместим груз из положения равновесия
(рис1 - б)., отпустим его и рассчитаем его
дальнейшее движение. Для этого составим
и решим уравнение движения. Для
материальной точки таковым является
уравнение второго закона Ньютона: ma=F.
Будем считать, что трение при движении
груза пренебрежимо мало. На груз действуют
три силы: тяжести mg,
реакция опоры
N
и упругости пружины
F.
Движение груза одномерное. Проекции на
ось x
силы тяжести
и реакции опоры равны нулю, силы упругости
F= -kx,
так что уравнение движения в проекции
на ось x
примет вид: ma
= - kx.
Учитывая, что a=d2x/dt2,
получили md2x/dt2
= -kx, где
m-масса
и k-коэффициент
жесткости - постоянные.
Введем новую постоянную:
Рассмотрим груз,
закрепленный на упругой пружине. Эта
физическая система называется пружинным
маятником, если груз можно считать
материальной точкой, а пружину - невесомой
и идеально упругой. При деформации
пружины груз движется вдоль оси x,
начало которой (х=0)
совместим с положением равновесия груза
(рис1 - а). Растяжению пружины соответствует
х>0,
сжатию - х<0.
Сместим груз из положения равновесия
(рис1 - б)., отпустим его и рассчитаем его
дальнейшее движение. Для этого составим
и решим уравнение движения. Для
материальной точки таковым является
уравнение второго закона Ньютона: ma=F.
Будем считать, что трение при движении
груза пренебрежимо мало. На груз действуют
три силы: тяжести mg,
реакция опоры
N
и упругости пружины
F.
Движение груза одномерное. Проекции на
ось x
силы тяжести
и реакции опоры равны нулю, силы упругости
F= -kx,
так что уравнение движения в проекции
на ось x
примет вид: ma
= - kx.
Учитывая, что a=d2x/dt2,
получили md2x/dt2
= -kx, где
m-масса
и k-коэффициент
жесткости - постоянные.
Введем новую постоянную:
2=k/m (1.1)
Уравнение движения примет вид дифференциального уравнения второго порядка с постоянными коэффициентами без правой части:
![]() (1.2)
(1.2)
Из математики известно1, что его решение имеет вид гармонической функции:
x=Asin( t + 0)=Acos( t+ 0’) (1.3)
где A, 0,0’ - постоянные, зависящие от начальных условий, при этом 0 =0’+/2.
Выясним физический смысл полученного результата.
x - координата, т.е. смещение груза из положения равновесия представляет собой знакопеременную величину. Почему? Упругая сила всегда направлена к положению равновесия и, казалось бы, должна вернуть груз в точку x=0. Однако по мере приближения к ней скорость груза растет, он по инерции минует эту точку, и его смещение меняет знак, увеличиваясь по модулю. Теперь направления упругой силы и скорости противоположны, так что движение замедляется, пока скорость не уменьшится до нуля. После этого груз, ускоряясь, начинает двигаться к положению равновесия, и рассмотренный процесс повторяется. Такое многократно повторяющееся изменение состояния физической системы называют колебаниями.
Колебания свойственны различным формам движения материи и хорошо знакомы нам. Примеры механических колебаний - движения маятников, шатунов, рессор, морские приливы и отливы, звук. Примеры электромагнитных колебаний - переменный электрический ток, процессы в колебательных контурах различных приемников и передатчиков электромагнитных средств связи, свет и т. д. По образному выражению крупного российского физика начала ХХ века Мандельштама в физике есть языки “национальные”- механики, акустики, оптики, электродинамики и есть “интернациональный” язык теории колебаний. Колебания любой физической природы описываются одинаковым математическим аппаратом, поэтому мы подробно рассмотрим только механические колебания и используем упомянутую аналогию при рассмотрении колебаний другой физической природы.
Общими для возникновения колебаний любой природы являются два условия. Первое состоит в том, что система имеет положение устойчивого равновесия. Это означает, что такому положению соответствует минимум потенциальной энергии системы, и что при отклонении от него возникает возвращающая сила F= -kx (в рассматриваемом случае это упругая сила), стремящаяся вернуть систему в равновесие. Второе условие - это инерционность системы, которая не позволяет ей остановиться в положении равновесия.
Колебания, которые совершает система, выведенная из положения равновесия и предоставленная самой себе, называются свободными. Если система колеблется под действием только внутренних сил (силами трения можно пренебречь), как в рассмотренном примере пружинного маятника, то ее колебания называются собственными.
Движение (процесс) называется периодическим, если каждое состояние системы повторяется через определенный промежуток времени. Его называют периодом - Т. Из этого определения следует:
x(t)=x(t+nT) (1.4)
где n-любое целое число.
Другая характеристика периодических процессов - частота равна числу колебаний в единицу времени. Следовательно,
= 1/T (1.5)
Простейшим типом периодических колебаний являются гармонические, при которых изменение характеристик состояния системы происходит по гармоническому закону, т.е. по закону синуса или косинуса (1.3). Этот тип колебаний часто встречается в природе и в технике, он наиболее прост с точки зрения математического описания и, что особенно важно, периодический процесс любого вида (и даже не периодический) может быть представлен как сумма конечного или бесконечного числа гармонических колебаний с разными частотами. В математике такому гармоническому анализу соответствует разложение в ряд Фурье, в физике - разложение в спектр. Спектральный анализ широко применяется в науке и в технике. Таким образом, изучение гармонических колебаний открывает широкие возможности анализа и понимания различных физических процессов.
Система, совершающая колебания, называется осциллятором (от латинского oscillare -колебаться). Закон движения гармонического осциллятора выберем в виде (см.формулу 1.3):
x =A sin(t+0) (1.6)
и вспомним известный из школы смысл входящих в него величин.
x - смещение, т.е. отклонение колеблющейся величины от положения равновесия, принятого за начало отсчета.
A - амплитуда, т.е. максимальное смещение, A=const. В нашем примере (рис.1) амплитуда равна начальному смещению груза из положения равновесия, т.е. величину амплитуды задает сообщенная системе энергия колебаний,
=(t+0) - фаза колебаний, аргумент гармонической функции, в СИ измеряется в радианах 0 - значение фазы при t=0 называют начальной фазой. Фаза определяет состояние системы в каждый момент времени и является линейной функцией времени. Если два колебания имеют разные фазы, то говорят, что они сдвинуты по фазе. При сдвиге по фазе на говорят, что колебания происходят в противофазе. Колебания с одинаковыми фазами или с разностью фаз, кратной 2, называют синфазными.
- круговая или циклическая частота, в СИ измеряется в рад/с. Из формулы (1.2) видно, что частота определяется параметрами колебательной системы: упругостью и массой маятника и не зависит от величины начального смещения. Используя соотношения (1.4) и (1.5), самостоятельно убедитесь в том, что
=2/T=2 (1.7)
Таким образом, круговая (циклическая) частота равна числу колебаний за 2 единиц времени и является аналогом угловой скорости при вращательном движении, если под T понимать период вращения.
Рис.1.2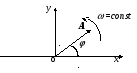
Вернемся к рассмотрению пружинного маятника. Как следует из формул (1.1) и (1.7), его период колебаний:
T=2![]() (1.8)
(1.8)
В рассматриваемом нами примере пружинного маятника его движение задано внутренними силами, поэтому формулы (11.1) и (11.8) выражают соответственно круговую частоту и период собственных колебаний. Обратите внимание, что они заданы собственными параметрами колебательной системы - m и k и не зависят от начальных условий, в частности, от амплитуды колебаний. Чем больше инертность (масса) маятника, тем медленнее изменяется его движение. С другой стороны, чем больше жесткость пружины, тем быстрее реагирует груз на ее воздействие.
Проанализируем другие характеристики гармонического колебательного движения, используя известные из механики соотношения =dx/dt, a=d/dt, F=ma. Помимо смещения -x гармонически изменяются скорость - , ускорение - a, возвращающая сила - F, причем, все они колеблются с одинаковыми частотами. Убедитесь в этом самостоятельно, а также в том, что соответствующие амплитуды равны:
max =A, amax=A2, Fmax=ma2 (1.9)
и что сдвиг по фазе между скоростью и смещением составляет /2 , ускорение и смещение колеблются в противофазе, а колебания возвращающей силы и ускорения синфазны.
Для возбуждения колебаний систему надо вывести из положения равновесия, т.е. сообщить ей дополнительную энергию. Возвращающая сила F= -kx создает потенциальную энергию:
Wп = kx2/2 = (kA2/2) sin2(t+0 ) (1.10)
Движущееся тело обладает энергией кинетической
Wк =m2/2 = (mA22/2) cos2(t+0). (1.11)
Значения потенциальной и кинетической энергий при колебаниях изменяются, при этом полная механическая энергия сохраняется:
W=Wк+Wп = kA2/2 = mA2/2 (1.12)
Это закономерно, так как колебания осциллятора происходят под действием консервативной силы. Проанализируйте самостоятельно, в каких состояниях осциллятор имеет только потенциальную энергию, а в каких только кинетическую, и как происходят взаимные превращения этих видов энергии друг в друга.