

§ 2. Унифицированная система элементов промышленной пневмоавтоматики (усэппа)
Система УСЭППА представляет собой набор отдельных конструктивных единиц-элементов, каждый из которых может выполнять лишь простейшую функцию преобразования сигналов в общей схеме всего устройства. В их числе постоянные и регулируемые пневмосо-противления, пневмоемкости, пневмореле, пневмоусилители и другие аналоги электромеханических и электронных устройств.
На практике применяют комплекс средств пневмоавтоматики, построенных на элементах УСЭППА, получивших наименование системы «Старт». В состав ее входит несколько модификаций пневматических регуляторов, реализующих различные законы регулирования, вторичные приборы, а также приборы, реализующие простейшие вычислительные функции.
Принцип действия блоков системы «Старт» основан на компенсации усилий при малых перемещениях подвижных элементов (мембран). Конструктивное выполнение регуляторов этой системы в значительной мере определяется принятым для них элементным принципом построения. Подобно тому как электрические элементы устанавливают на специальные платы (шасси), оснащенные необходимыми монтажно-соединительными деталями (шинами, контактами, панелями, клеммами и т. д.), пневмоэлементы УСЭППА также монтируют на платах, содержащих коммуникационные каналы-пневмопроводы и монтажные детали. Платы-шасси приборов изготовляются склеиванием трех пластин из органического стекла. На обеих сторонах одной из них, средней, штамповкой или фрезерованием нанесены углубления, «рисунок» которых соответствует нужной схеме соединения элементов УСЭППА и принятому их расположению. Склеивание этой средней пластины с двумя другими и необходимые сквозные отверстия в них обеспечивают весь набор герметичных коммуникаций между элементами.
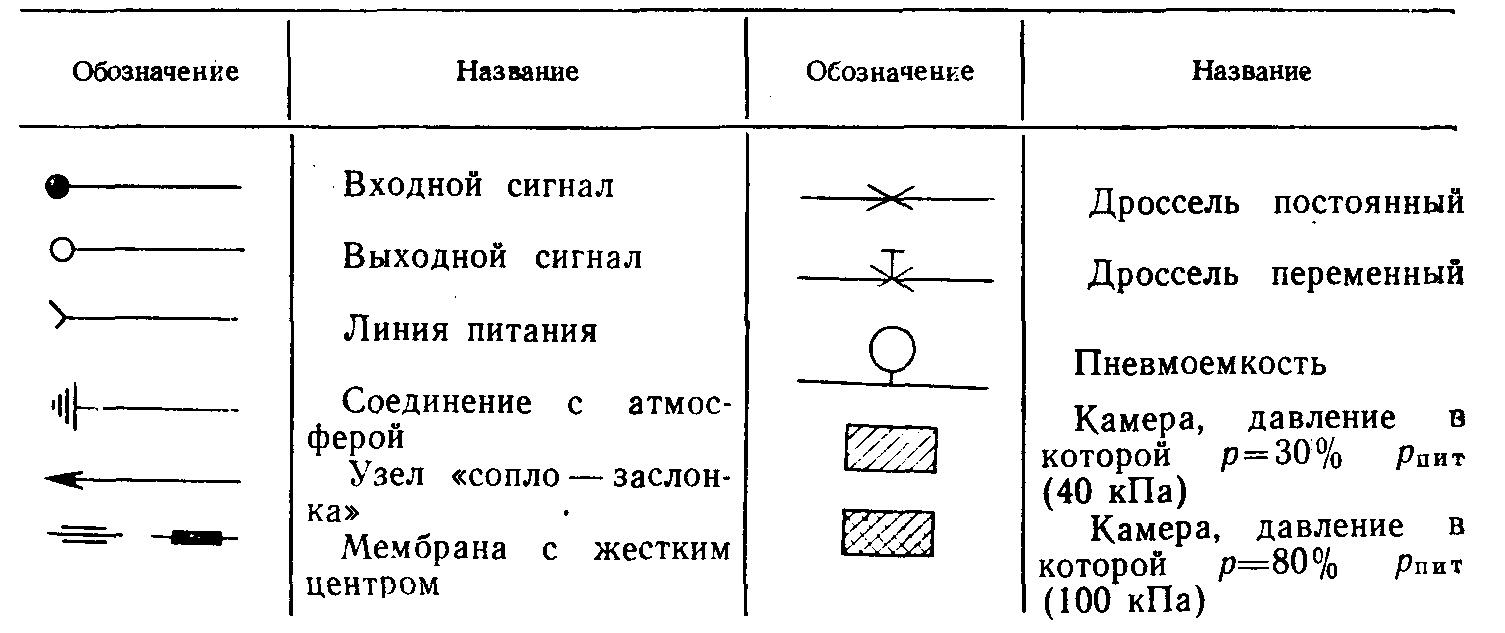
Элементы УСЭППА соединяются с каналами в коммутационной плате с помощью специальных «ножек», образующих монтажный цоколь элемента и в то же время осуществляющих подвод и отвод воздуха к нему. При изображении элементов на схемах приняты следующие условные обозначения.
Рассмотрим основные элементы и узлы системы УСЭППА. Постоянный дроссель (рис. 14.1), предназначенный для использования в качестве нерегулируемого пневмосопротивления, выполнен в виде капилляра 3, помещенного в продольном канале винта 5. Последний ввинчен в корпус 2, имеющий две присоединительные ножки 1.
Давление pi через одну из присоединительных ножек и просверленные отверстия в корпусе (на схеме не показаны) поступает к капилляру, на наружной поверхности которого навита шерстяная пряжа 4. Воздух проходит через пряжу и внутреннюю часть капилляра. При этом давление р2 воспринимается с другой стороны капилляра через вторую коммутационную ножку. Сопротивление, создаваемое постоянным дросселем, определяется геометрическими размерами капилляра (обычно диаметр—0,3 мм, длина 20 мм).
Переменный дроссель (рис. 14.2) предназначен для использования в качестве переменного сопротивления в пневматических цепях. В корпусе 1 помещена втулка 2 с конусным отверстием, вдоль оси которого расположена игла. 3. Последняя закреплена в жестком центре разделительной мембраны 5 и пружиной 4 прижимается к лекальной пластине 6. При вращении настроечной головки эта пластина, опирающаяся на винты 8, давит на иглу 3, заставляя ее перемещаться вдоль оси втулки 2. В результате перемещения иглы 3 зазор между нею и конусной втулкой изменяется, чем и достигается настройка проводимости а дросселя в пределах 0—1. Переменный дроссель присоединяется к пневматическим цепям через две коммутационные ножки, которые сообщаются с двумя торцевыми сторонами конусной втулки через сверления в корпусе. Настроечная головка дросселя снабжена равномерно оцифрованной шкалой с указателем 7.

Переменный дроссель имеет индивидуальную градуировку в единицах тех величин, изменение которых осуществляется изменением проводимости дросселя (например, время изодрома, коэффициет усиления и т. п.).
Пневмоемкости предназначены для создания инерционных звеньев в пневматических цепях. Выпускают их с объемом рабочей камеры 40 и 50 см3.
Дроссельный сумматор (сумматор на сопротивлениях) предназначен для суммирования двух пневматических сигналов (рис. 14.3). Уравнение этого сумматора легко можно получить из аналогии пневматических цепей электрическим.

Для электрической цепи
![]()
где I—сила тока; g— проводимость; U—напряжение.
Для пневматической цепи при незначительных расходах воздуха
![]()
где Q—расход воздуха; α—проводимость дросселя; Δр—перепад давления на дросселе.
Для электрической разветвленной цепи в соответствии с законом Кирхгофа сумма токов, направленных к узлу, равна сумме токов, направленных от узла.
Рассматривая точку А в качестве такого узла и, учитывая, что выходной сигнал рвых обычно поступает в глухую камеру (по этой линии расход равен нулю, можно записать

менения входного сигнала
![]()
Он состоит из входной Б и выходной А камер, разделенных гибкой мембраной, жесткий центр которой служит заслонкой сопла.
Повторитель действует по принципу компенсации сил. Входной пневматический сигнал поступает в камеру Б и развивает на мембране усилие, направленное вниз. В камеру А через постоянный дроссель, в комплекте с которым работает повторитель, непрерывно подается воздух по линии питания. Часть воздуха из камеры А через зазор между заслонкой и соплом выпускается в атмосферу. В камере А устанавливается давление, промежуточное между давлением рпит и атмосферным. Это давление, которое является выходным сигналом элемента, развивает на мембране усилие, направленное вверх.

Оба противоположно направленные на мембрану усилия непрерывно сравниваются. При нарушении равновесия, например при увеличении рвх, мембрана прикроет сопло и уменьшит расход воздуха в атмосферу. Давление в камере А(рвых) увеличится, и равновесие восстановится. Благодаря высокой чувствительности мембраны повторитель обладает высокой точностью повторения сигнала, однако мощность этого элемента весьма ограничена.
У

При увеличении входного давления мембрана 2 закрывает сопло 1, а мембрана 3 закрывает сопло 4. Давление в камере В повышается клапан 5 открывается, и давление в камере Б и на выходе увеличивается. Одновременно под действием обратной связи увеличивается давление в камерах Г и Е. Сопла 1 и 3 приоткрываются, и воздух питания снова проходит через камеры В, Г и Е в атмосферу. Давление в камере В уменьшается, и клапан закрывается. На выходе устанавливается давление рвых, равное входному рвх. С уменьшением входного давления мембрана 2 открывает сопло 1, а мембрана .3 открывает сопло 1. Часть воздуха из выходной камеры Б проходит через сопло 1 в атмосферу, и давление на выходе понижается. Используя дополнительный источник питания и управляющий клапан 5 большого проходного сечения, усилитель обеспечивает усиление выходного сигнала по мощности (за счет увеличения расхода воздуха).

Элемент сравнения предназначен для алгебраического суммирования пневматических сигналов. Изготавливают трехмембранный и пятимембранный (рис. 14.6) элементы сравнения.
В конструктивном отношении он представляет собой набор металлических шайб, разделенных «вялыми» мембранами. Жесткие центры всех мембран соединены общим штоком, концы которого служат заслонками, управляющими скоростью истечения воздуха через нижнее и верхнее сопла. Для обеспечения подстройки элементов сопла выполняют регулируемыми по положению.
Схема включения, показанная на рис. 14.6,б, осуществляет алгебраическое суммирование трех входных пневматических сигналов, которые поступают в камеры Д, Г и В элемента. Через верхнее сопло подводится воздух питания, а нижнее сопло соединено с атмосферой. Давление в камерах А и Е равно выходному сигналу, который подводится в камеру Б в качестве отрицательной обратной связи. Если обозначить площадь большой мембраны через F, а малой мембраны — через f, то условие равновесия усилий будет иметь вид

Задатчик (рис. 14.7) с постоянным дросселем предназначен для поддержания постоянного (заданного) давления сжатого воздуха в глухих камерах регулирующих устройств. Он состоит из шарикового клапана, образованного шариком 4 и седлом 3, пружины 5, винта 7, тарелки 6, входной и выходной присоединительных ножек 2 и1. При подаче через одну из ножек воздуха питания в камеру Л в ней устанавливается давление, соответствующее давлению, при котором сжимается пружина. Избыток сжатого воздуха через шариковый клапан и камеру Б выпускается в атмосферу. Изменяя степень сжатия пружины при помощи винта, можно получить различные значения давления воздуха на выходе задатчика.

Инерционное звено образуется при совместном включении переменного дросселя и пневмоемкости (рис. 14.8).
При небольших расходах воздуха через переменный дроссель с проводимостью а справедливо соотношение
![]()
Дифференцируя по времени известное уравнение Менделеева — Клапейрона для пневмоемкости, имеем
![]()
где V—объем пневмоемкости; R—универсальная газовая постоянная; θ— абсолютная температура воздуха. Подставив (14.10) в (14.11), получим
![]()
где T=V/Rθα—постоянная времени звена, которую можно изменять путем изменения проводимости переменного дросселя.
Интегрирующее звено образуется при совместном включении элемента сравнения I и инерционного звена II (рис. 14.9). При этом выходной сигнал звена заводится в камеру Д элемента сравнения I. Выходной сигнал этого элемента равен алгебраической сумме его входных сигналов:
![]()
Он же является входным сигналом инерционного звена, для которого справедливо соотношение
![]()

Величину Т — постоянную времени — можно изменять путем изменения проводимости а переменного дросселя инерционного звена.

Реле переключения (рис. 14.10) применяют для коммутации пневматических каналов автоматических регуляторов при переходе с автоматического регулирования на ручное.
Реле состоит из трех камер, разделенных мембранами, жесткие центры которых являются заслонками сопел C1 и С2. В камеру Л подается командный сигнал, камера В соединяется с атмосферой, а камера Б является выходной.
При рк==0 мембранный блок под действием пружины занимает нижнее положение, открывая сопло С2 и закрывая сопло C1. При этом на выход проходит входной сигнал рвх2. При подаче командного сигнала рк=1 открывается сопло C1 и закрывается сопло С2. На выход проходит входной сигнал рвх2.