

§ 3. Исполнительные механизмы
Исполнительные механизмы предназначены для управления регулирующими органами в соответствии с выходным сигналом регулирующего устройства.
В зависимости от вида энергии, используемой для создания перестановочного усилия, исполнительные механизмы подразделены на пневматические, электрические и гидравлические.
Основные преимущества электрических исполнительных механизмов — большие перестановочные усилия, значительная (практически любая) длина хода штока. Недостатки — относительно большая масса; сложность наладки, обслуживания и ремонта; высокая стоимость; необходимость взрывозащищенного исполнения. Последнее обстоятельство значительно ограничивает область применения электрических исполнительных механизмов.
Преимущества пневматических исполнительных механизмов — простота конструкции, низкая стоимость, пожаро- и взрывобезопасность. Недостатки — ограниченность расстояния между исполнительным механизмом и регулирующим устройством, а также необходимость создания системы снабжения сжатым воздухом.
Основное преимущество гидравлических исполнительных механизмов — большие перестановочные усилия; недостатки — необходимость создания специальной гидравлической системы питания и сложность обслуживания.
В связи с этими обстоятельствами в
нефтяной и газовой промышленности
применяют в основном пневматические
исполнительные механизмы, которые и
рассмотрим в

Пневматические исполнительные механизмы классифицируют по различным признакам.
В зависимости от вида чувствительного элемента, воспринимающего энергию сжатого воздуха и преобразующего ее в перестановочное усилие на выходном элементе, различают мембранные, сильфонные и лопастные исполнительные механизмы.
В зависимости от характера движения выходного элемента существуют прямоходные и поворотные исполнительные механизмы.
Конструкция и принцип действия мембраннно-пружинного исполнительного механизма были рассмотрены в §1 настоящей главы (см. рис. 15.1,а). Следует отметить, что подвижная система в такой конструкции подвержена значительному влиянию внешних сил. Поэтому для улучшения статических и динамических свойств пневматических механизмов широко применяют специальные устройства, которые называют позиционерами.
Основная роль позиционера—обеспечение пропорциональной зависимости между входным (изменение давления сжатого воздуха) и выходным (перемещение штока) сигналами исполнительного механизма.
На рис. 15.3 показана схема позиционера типа ПР. Чувствительный элемент его—мембранная сборка двух мембран с различной эффективной площадью. Так как эффективная площадь нижней мембраны 5 больше эффективной площади верхней мембраны 4, то поступающее в мембранную полость давление с выхода регулирующего устройства создает усилие, направленное вниз. Это усилие
уравновешивается усилием пружины 6 обратной связи. Позиционер крепится к исполнительному механизму таким образом, что опорный диск последнего непосредственно перемещает шток 5. Пружина обратной связи одним концом упирается в гайку 7, а другим—в мембранную сборку. С другой стороны к штоку 3 мембранной сборки с помощью пружины 1 прижимается золотник 2 (шарик). Перемещением гайки 7 относительно штока 8 осуществляется предварительный натяг пружины обратной связи с целью обеспечения начала работы позиционера при минимальном давлении на входе в камеру А.
Работа позиционера совместно с исполнительным механизмом сводится к следующему. При увеличении давления в камере А сборка мембран прогибается вниз, преодолевая упругость пружин 6. При этом шарик 2 также опускается, закрывая отверстие между камерами В и 5 (последняя соединена с атмосферой). Сжатый воздух из линии питания начинает поступать в рабочую полость исполнительного механизма, что вызовет перемещение опорного диска исполнительного механизма. В этом случае шток 8 переместится вверх и сожмет пружину 6 обратной связи. В момент, когда эта пружина уравновесит усилие со стороны сборки мембран, нарастание давления в камере Вив рабочей полости исполнительного механизма прекратится. Система придет в состояние равновесия при новом положении мембраны исполнительного механизма (а следовательно, и его штока), пропорциональном приращению давления на выходе регулирующего устройства РУ.
Таким образом, позиционер представляет собой пневматический усилитель с обратной связью по положению выходного штока исполнительного механизма. Длина необходимого хода штока настраивается перемещением гайки 7 относительно пружины обратной связи 6, что приводит к изменению числа рабочих витков.
Применение позиционера уменьшает гистерезис исполнительного механизма, увеличивает его перестановочное усилие (за счет использования увеличенного давления питания позиционера). При настройке автоматического регулятора на небольшое значение коэффициента усиления в случае небольшого отклонения текущего значения регулирующего параметра от заданного приращение давления воздуха в рабочей полости исполнительного механизма будет также незначительным. В этих условиях для обеспечения пропорционального перемещения регулирующего органа необходимо применять позиционер.
Современные позиционеры выпускают в двух исполнениях— блочном и встроенном непосредственно в исполнительный механизм.
На поршневых пневматических исполнительных механизмах устанавливают так называемые реверсивные позиционеры, которые направляют сжатый воздух питания либо в одну, либо в другую полость поршневого привода в зависимости от знака изменения регулируемого параметра.
В связи с перспективой развития электрических систем управления на базе ЭВМ, а также ограниченностью области применения электрических исполнительных механизмов, представляют интерес смешанные системы. Одним из возможных вариантов реализации такой системы может быть сочетание электрического устройства управления, пневматического исполнительного механизма и электропневматического позиционера.
Пневматические исполнительные механизмы часто оснащены ручными дублерами, предназначенными для ручного механического перемещения затвора регулируемого органа при аварийном отключении сжатого воздуха.
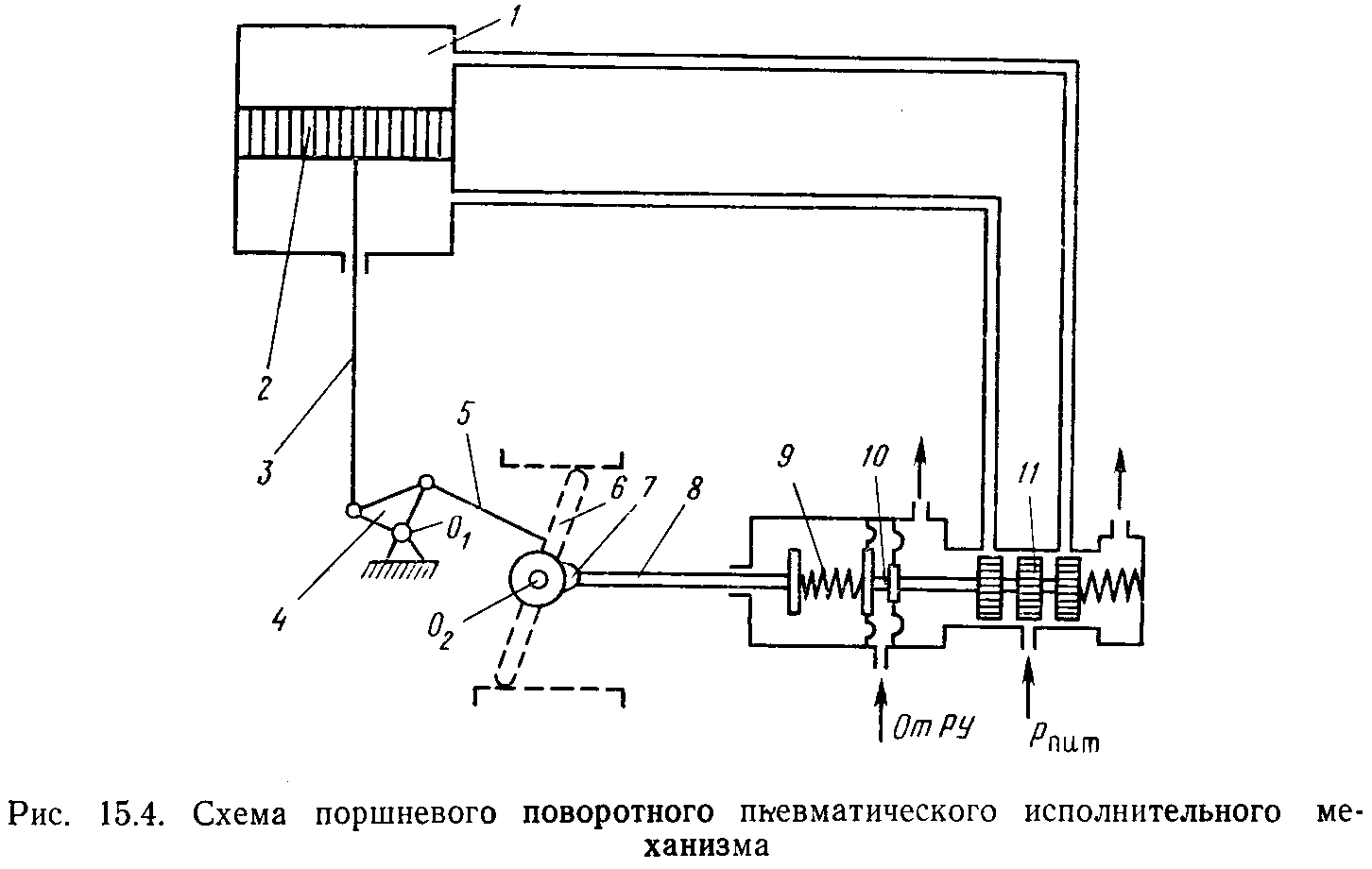
На рис. 15.4 показана схема поршневого поворотного пневматического исполнительного механизма с реверсивным позиционером. Поршневой привод состоит из цилиндра 1, поршня 2 и штока 3 и преобразует энергию сжатого воздуха в поступательное перемещение штока. Передаточный механизм, включающий щеки 4 и поводок 5, преобразует поступательное перемещение штока 3 в поворотное перемещение поводка 5, а, следовательно, и оси О2, на которой закреплена заслонка 6. Основные элементы позиционера — кулачок 7, шток 8, пружина обратной связи 9, мембранная сборка 10 и золотник 11.
Схема работает следующим образом. При увеличении давления сжатого воздуха, поступающего от регулирующего устройства (РУ), сборка двух мембран 10 ввиду их различной эффективной площади перемещается влево. Золотник 11 пропускает воздух питания в нижнюю полость, соединенную с атмосферой. Поршень 2 поднимается, перемещая вверх шток 3, который, в свою очередь, поворачивает с помощью щек 4 поводок 5 по часовой стрелке. Заслонка 6 закрывается. При повороте поводка 5 кулачок 7 толкает шток 8 позиционера. Пружина обратной связи 9 сжимается, перемешая сборку
мембран 10, а следовательно, и золотник 11 вправо. Последний перекрывает каналы, соединяющие позиционер с цилиндром привода.
При уменьшении давления сжатого воздуха от регулирующего устройства золотник 11 направляет воздух питания в верхнюю полость цилиндра привода, соединяя нижнюю полость с атмосферой. Перемещение поршня 2 вниз вызывает закрытие заслонки.
Установка кулачка 7 позиционера на поводке 5 передаточного механизма обеспечивает пропорциональную зависимость между приращением входного пневматического сигнала (от РУ) и углом поворота регулирующего органа (в нашем примере—заслонки).
Поршневые поворотные исполнительные механизмы предназначены для работы с шаровыми и заслоночными регулирующими органами. Учитывая условия работы этих регулирующих органов на потоке регулируемой среды, конструкцией рассмотренного исполнительного механизма предусмотрено создание переменного крутящего момента, зависящего от угла поворота выходного элемента (поводка 5).