

§ 4. Запоминающие устройства
Как уже указывалось выше, ЗУ ЦВМ подразделяются на оперативные (ОЗУ), постоянные (ПЗУ) и внешние (ВЗУ).
В ОЗУ для хранения информации применяют ферритовые сердечники, которые изготовляют путем прессования порошка из окислов железа, магния и марганца. Сердечники имеют форму тороидов (колец) диаметром 0,5—1,2 мм (рис. 23.6,а).

Если ток I проходит через обмотку я» сердечника, в нем создается магнитный поток Ф, характеризующийся напряженностью Н внешнего магнитного поля, окружающего обмотку. Магнитная индукция В — отношение магнитного потока Ф к площади сечения сердечника S(В=Ф/S)—зависит от напряженности Н, которая, в свою очередь, является функцией силы тока I(H==f/I). Зависимость магнитной индукции В от напряженности Н имеет петлеобразную форму (рис. 23.6,6).
Материал сердечника при Н=0 (I=0) может находиться в каком-либо из двух состояний, одно из которых характеризуется магнитной индукцией плюс Вr и обозначено 1, а другое—магнитной индукцией минус Вr и обозначено 0. Эти два состояния используют для запоминания единицы и нуля.
Перемагничивание сердечника из одного состояния в другое производится импульсами тока (рис. 23.6,е). Пусть сердечник находится в состоянии 0. При прохождении по обмотке импульса Im положительной полярности материал сердечника перемагничивается в направлении, показанном стрелками, до точки А. С уменьшением силы тока до нуля сердечник переходит в состояние 1 и остается в нем. При прохождении через обмотку отрицательного импульса 2 половинной амплитуды сердечник не меняет своего состояния, так как магнитная индукция В не изменяется при изменении напряженности Н в пределах петли гистерезиса (рис. 23.6,6). Для перемагничивания сердечника из состояния 1 в состояние 0 подается импульс 3 отрицательной полярности (рис. 23.6,в). Повторное приложение такого же импульса 4 не меняет состояние сердечника. Таким образом, чтобы изменить состояние ферритового сердечника, необходимо пропустить через его обмотку импульс тока определенного значения и противоположного по отношению к предыдущему случаю направления.

Один ферритовый сердечник позволяет запомнить одну единицу двоичной информации — бит. Для хранения n чисел из сердечников формируют матрицы (рис. 23.7). Сердечники в матрицах пронизываются горизонтальными x1, х2, ..., xn и вертикальными у1, у2, ..., уn координатными (адресными) шинами. Кроме того, все середчники последовательно пронизываются шиной считывания информации zсч.
Для записи единицы в любой сердечник следует пропустить полутоковые импульсы Im/2 по тем координатным шинам, на пересечении которых он находится. Эти импульсы складываются на данном сердечнике, и их действие становится аналогичным воздействию импульса тока с амплитудой 1m. Сердечник перемагничивается в состояние 1. Для записи нуля используют полутоковые импульсы обратной полярности.
Считывание информации из сердечника проводят теми же импульсами, пропускаемыми по координатным шинам. При этом вначале в сердечник записывается нуль. Если он и до этого был в нулевом состоянии, то во вторичной обмотке сердечника, роль которой выполняет обмотка считывания, ток не индуцируется. Отсутствие индуцированного импульса в обмотке считывания является признаком того, что с сердечника считан нуль. Если же до записи нуля сердечник был в единичном состоянии, то при записи нуля происходит его перемагничивание, а в обмотке считывания (как в трансформаторе) индуцируется импульс тока. После считывания единицы сердечник находится в нулевом состоянии, т. е. записанная информация разрушается и возникает необходимость в ее восстановлении. Для этого в координатные шины вслед за импульсами считывания единицы посылаются сигналы восстановления обратной полярности, которые вновь записывают единицу. Чтобы избежать в этот момент записи единицы в те сердечники, в которых при считывании были нули, в матрицах используют четвертую, не показанную на рис. 23.7 шину—шину запрета, по которой пропускают полутоковый импульс запрета, нейтрализующий сигнал восстановления единицы.
Рассмотренную матрицу применяют для хранения п двоичных чисел, соответствующих одному разряду всех n чисел. Для записи в ОЗУm разрядов двоичных чисел используют т матриц, которые, располагаясь одна над другой, образуют куб памяти.
Блок памяти ПЗУ строится обычно на ферритовых сердечниках с непрямоугольной петлей гистерезиса, работающих как линейные трансформаторы. Одна из наиболее распространенных схем является схема с числовой линейкой, в которой число сердечников равно количеству разрядов записываемых чисел (рис. 23.8).
П
Во время считывания числа в соответствующую числовую шину посылается импульс считывания, который индуцирует во вторичных обмотках «прошитых» сердечников единицы, а «непрошитых»—нули. 'В соответствии со схемой, приведенной на рис. 23.8, на шине 1 хранится число 110, на шине 2— 1110, на шине 3—0100.
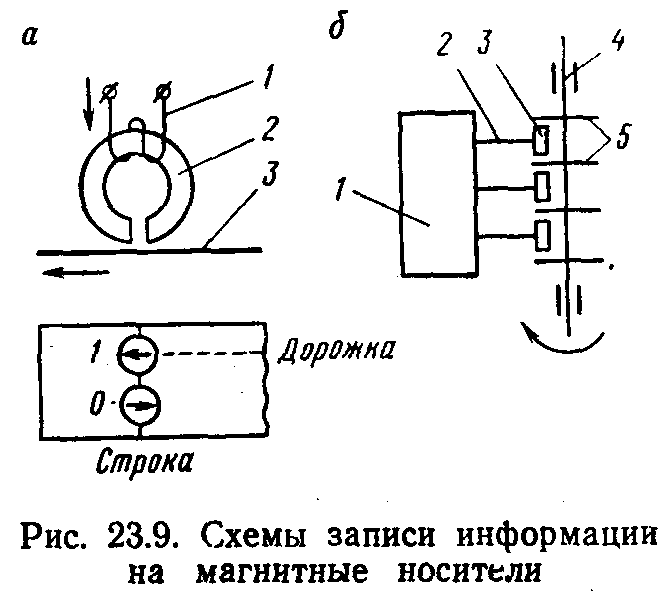
Для хранения больших объемов информации предназначены ВЗУ, использующие магнитные ленты и диски. Магнитная лента представляет собой гибкую синтетическую ленту, на которую нанесен слой лака толщиной 10—20 мкм. Запись и считывание информации осуществляются с помощью головки (рис. 23.9,а) состоящей из магнитного сердечника 2 и обмотки 1. Сердечник имеет замкнутую форму, но в месте касания ленты в нем предусмотрен узкий зазор.
Если электрический ток протекает по обмотке, в сердечнике возникает магнитный поток соответствующего направления. В области зазора этот поток замыкается по слою лака, намагничивая содержащиеся в нем частицы магнитного материала. В результате участок поверхности, находящийся под зазором магнитной головки, намагничивается, причем направление его намагничивания зависит от направления магнитного потока в сердечнике головки и, следовательно, от направления электрического тока в обмотке головки. Одно направление намагничивания магнитной поверхности принимается за единичное, а другое—за нулевое (см. рис. 23.9,а). Информация записывается на ленту одновременно с помощью нескольких головок, расположенных по одной линии поперек направления движения ленты. Каждой головке соответствует своя дорожка записи.
Считывание информации происходит при помощи тех же головок. Когда намагниченный участок проходит мимо головки, в ее обмотке индуцируется эдс, полярность которой зависит от направления намагниченности ленты (0 или 1). Ширина ленты составляет 6,5—35 мм. Размещение информации зависит от ширины ленты: на узких записывается последовательным кодом, на широких — параллельным.
Кроме магнитных лент в ВЗУ применяют также магнитные барабаны и магнитные диски. Магнитные диски, широко используемые в машинах серии ЕС ЭВМ, представляют собой круглые алюминиевые пластины толщиной 2—2,5 мм и диаметром 250—650 мм, покрытые с обеих сторон магнитным лаком (рис. 23.9,6). Обычно на общем валу 4 размещены шесть дисков 5, в результате чего получают сменный пакет. Частота вращения вала составляет 900—3600 об/мин. Запись и считывание информации осуществляются с помощью плавающих магнитных головок 3, закрепленных на подвижных пружинных рычагах 2. Механизм привода 1 приводит в действие рычаги 2 и устанавливает головки 3 на нужные дорожки, расположенные вдоль концентрических окружностей дисков.