

4.4.1. Временные характеристики и их свойства
При исследовании поведения САУ во времени достаточно очевидно, что все воздействия имеют случайный, непредсказуемый характер. Следовательно, при анализе и синтезе необходимо сформировать систему типовых воздействий и реакций на них САУ, наиболее достоверно отражающую качество процессов управления. При этом принято считать, что, если САУ хорошо реагирует на некоторое типовое воздействие, а, значит, имеет хорошую типовую динамическую характеристику, то и при произвольных входных воздействиях она будет справляться с задачами управления.
В ременная
характеристика
- это зависимость изменения той или иной
величины САУ от времени, возникающего
под действием тех или иных факторов. Из
временных характеристик в ТАУ наибольшее
распространение получили переходная
функция и
импульсная
переходная функция
(функция веса, весовая функция).
ременная
характеристика
- это зависимость изменения той или иной
величины САУ от времени, возникающего
под действием тех или иных факторов. Из
временных характеристик в ТАУ наибольшее
распространение получили переходная
функция и
импульсная
переходная функция
(функция веса, весовая функция).
Схема формирования
переходной функции отображена на рисунке
4.7.
Переходная функция САУ (объекта, блока,
элемента, звена) - это реакция на
единичное ступенчатое воздействие.
Обычно переходную функцию обозначают
символом
![]() .
.
Для снятия переходных характеристик элементов с малой постоянной времени используются быстро действующие измерительные приборы с электрическим сигналом на выходе.
Запись измеряемых сигналов осуществляется с помощью шлейфовых осциллографов или цифровых накопителей.
Переходные характеристики элементов с большой постоянной времени регистрируются обычными многоточечными приборами (потенциометрами).
Один из способов получения динамических характеристик (передаточной функции) связан с проведением экспериментов и с последующей идентификацией свойств объекта.
У словно
данная задача может быть представлена
в виде рисунка слева. На входе объекта
задан известный сигналu(t).
На выходе
регистрируется сигнал
y(t).
словно
данная задача может быть представлена
в виде рисунка слева. На входе объекта
задан известный сигналu(t).
На выходе
регистрируется сигнал
y(t).
Требуется определить передаточную функцию объекта.
Передаточная функция объекта численно равна отношению преобразования Лапласа его выходной величины и преобразования Лапласа входного воздействия при нулевых начальных условиях.
4.4.2. Определение характеристик апериодического звена
С хема
апериодического звена и его реакция на
единичный скачок на входе представлены
на рисунке 4.8, гдеW(s)
– передаточная функция звена, T
– постоянная времени, k
– коэффициент передачи.
хема
апериодического звена и его реакция на
единичный скачок на входе представлены
на рисунке 4.8, гдеW(s)
– передаточная функция звена, T
– постоянная времени, k
– коэффициент передачи.
Как следует из рисунка, график переходной характеристики звена асимптотически стремится к установившемуся уровню k.
При этом плавный характер, отсутствие колебаний и обусловили название “апериодическое” (т.е. непериодическое).
Другое название “инерционное” связано с тем, что постоянная времени T препятствует мгновенному достижению уровня k.
Таким образом, чем больше величина постоянной времени T, тем звено “инерционнее”.
Аналитическое выражение для переходной характеристики звена определяется функцией времени
![]() (4.13)
(4.13)
Отсюда
следует, что при t
= T
соблюдаются условие
![]() ,
а при -
,
а при -![]() .
.
4.4.3. Определение характеристик колебательного звена
Как известно, колебательное звено может быть выражено передаточной функцией вида
![]()
 ,
,
где
![]() - соответственно постоянная времени,
коэффициент демпфирования колебаний
иk
– коэффициент передачи.
- соответственно постоянная времени,
коэффициент демпфирования колебаний
иk
– коэффициент передачи.
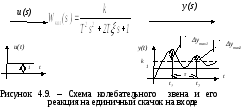
Схема колебательного звена и его реакция на единичный скачок на входе представлены на рисунке 4.9. Переходная функция колебательного звена имеет вид [7]
 . (4.14)
. (4.14)
Используя выражение
(4.14) можно определить параметры
![]() колебательного звена. Они находятся
из следующих соотношений:
колебательного звена. Они находятся
из следующих соотношений:
 (4.15)
(4.15)
Входящие в эти
выражения параметры
![]() и
и![]() вычисляются непосредственно по переходной
характеристике следующим образом:
вычисляются непосредственно по переходной
характеристике следующим образом:
![]() - круговая частота,
- круговая частота,
![]() - степень затухания (4.16)
- степень затухания (4.16)
где τ - период колебаний;
![]() ,
,
![]() - амплитуды колебаний относительно
установившегося значения, отстоящие
друг от друга на период колебанийτ.
- амплитуды колебаний относительно
установившегося значения, отстоящие
друг от друга на период колебанийτ.
Из последнего выражения (4.16) имеем:
![]() .
(4.17)
.
(4.17)
Таким образом, по экспериментально снятой переходной характеристике (подобной представленной на рисунке 4.9) можно найти все параметры колебательного звена, входящие в выражение передаточной функции звена.